
Hat CBack Driver
SKU:A100






説明
Hat CBack Driverは、M5StickC に対応したサーボドライバボードで、STM32F030F4P6 制御ソリューションを採用し、I2C 通信インターフェースで M5StickC と通信します。4 つの PWM サーボドライブインターフェースを備えており(サーボの駆動電源は M5StickC の内蔵バッテリーに直接接続され、SG90 など一般的な仕様のサーボを駆動可能)、StickC 上部の I2C バスを引き出し、STM32 経由で追加の GPIO インターフェースも提供します。これにより、一般的なロジックレベル信号および ADC アナログ信号の入力読み取りが可能です。背面には LEGO 互換ホール設計があり、このドライバボードを LEGO 構造に簡単に組み込むことができます。例えば、サーボを用いたロボットハンドなどの制御可能な構造を構築できます。
特徴
- 4 x サーボ駆動
- C/C Plus 対応
- インターフェース拡張 (GPIO, I2C)
含まれるもの
- 1 x Hat CBack Driver
- 2 x 六角ネジ M2*5
- 1 x 六角レンチ
- 1 x LEGO 互換コネクタ
アプリケーション
- サーボコントローラ
- ロボット制御
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030F4P6 |
| 通信インターフェース | I2C 通信 @ 0x38 |
| 動作電流 | 15mA |
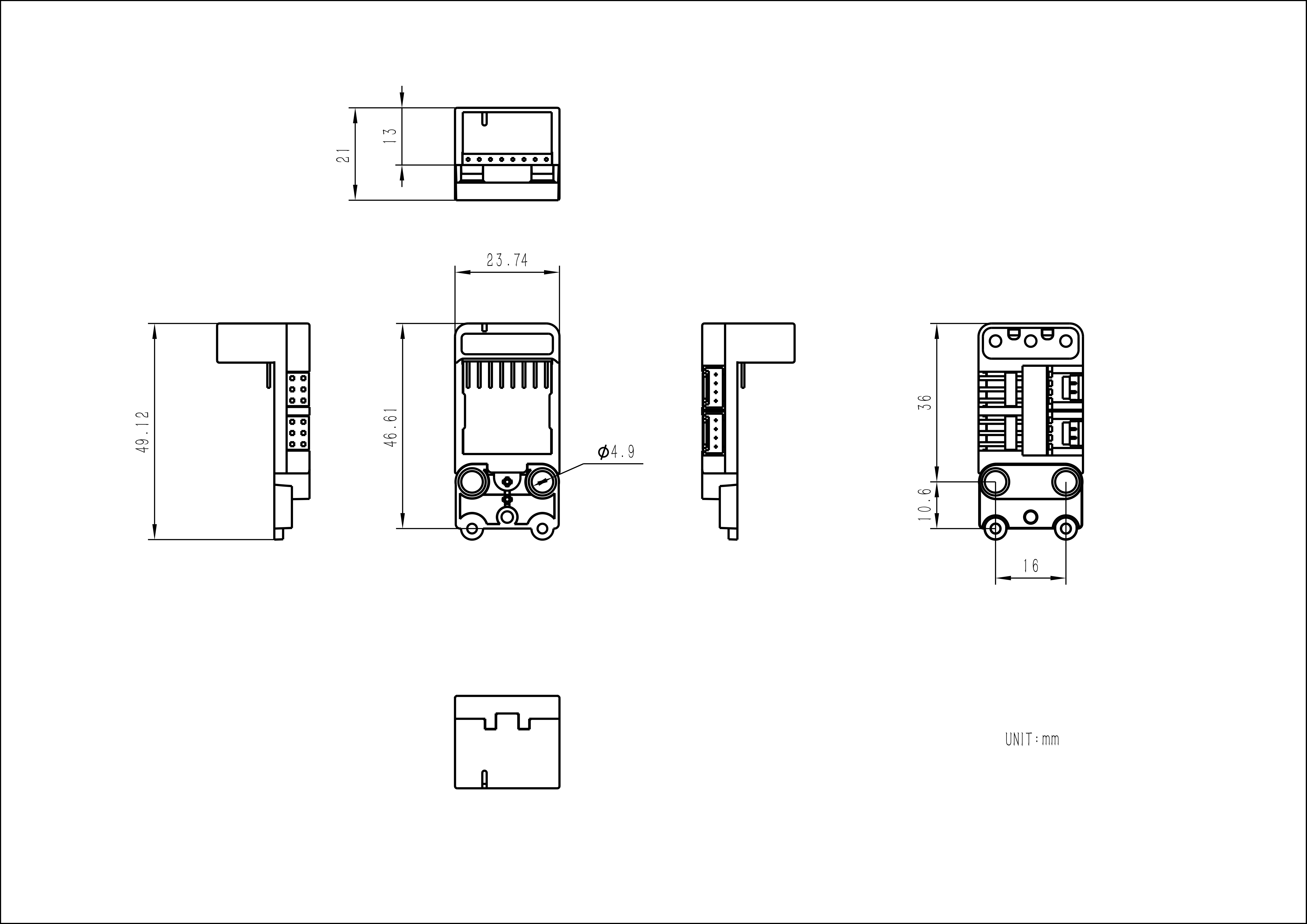
| 製品サイズ | 23.7 x 49.2 x 21.0mm |
| 製品重量 | 9.0g |
| 梱包サイズ | 138.0 x 93.0 x 22.0mm |
| 総重量 | 13.5g |
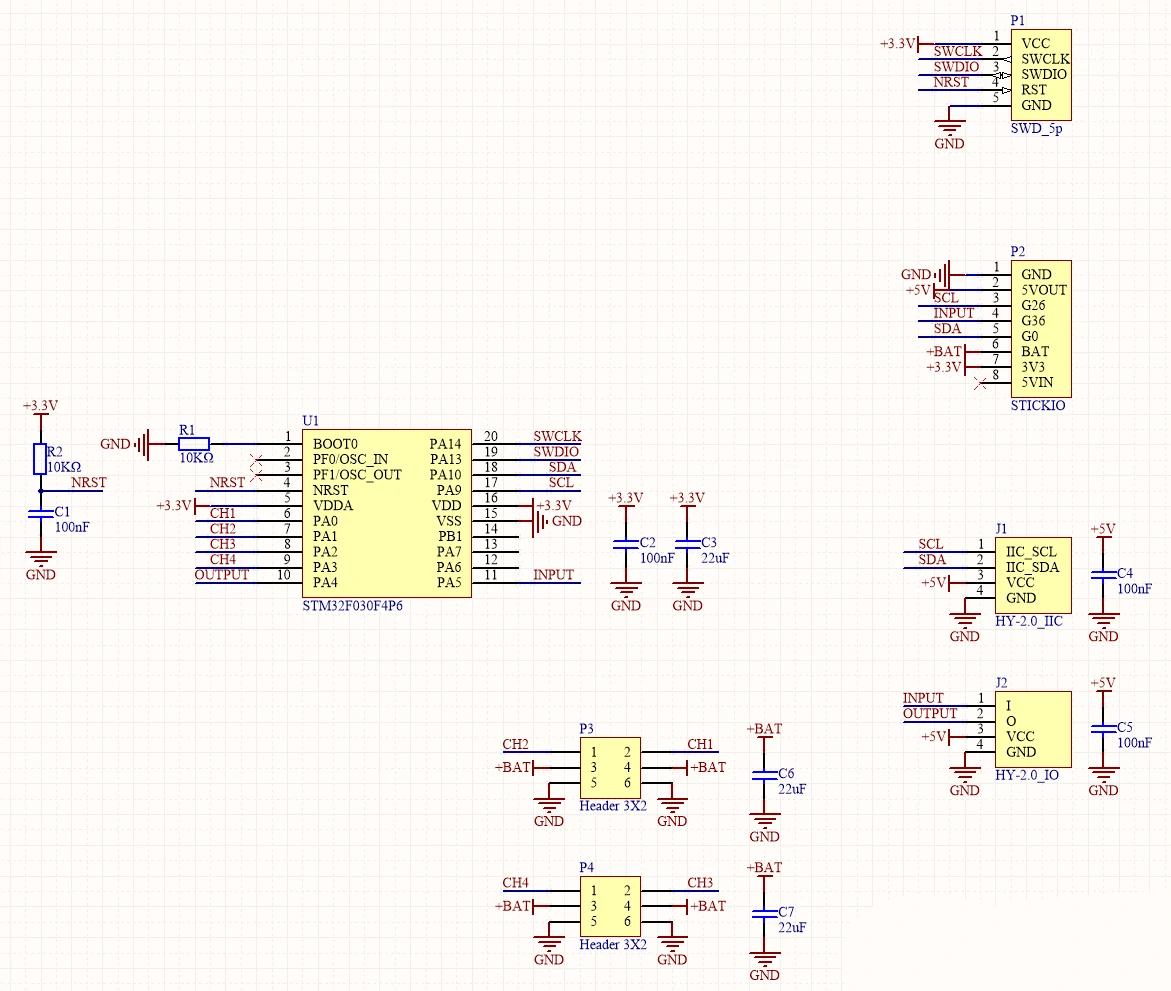
回路図
ピンマップ
| M5StickC | G0 | G26 | 3.3V | GND |
|---|---|---|---|---|
| C Back Driver | SDA | SCL | 3.3V | GND |
製品サイズ
ソフトウェア
UiFlow1
通信プロトコル
- プロトコルタイプ:I2C
- I2C アドレス:0x38
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_ANGLE_REG | 0x00-0x03
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0] 0x00 | R/W | SERVO1 Angle value(0~180)
| servo_2_reg[1] 0x01 | R/W | SERVO2 Angle value(0~180)
| servo_3_reg[2] 0x02 | R/W | SERVO3 Angle value(0~180)
| servo_4_reg[3] 0x03 | R/W | SERVO4 Angle value(0~180)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| SERVO_PULSE_REG | 0x10-0x17
| ------------------------------------------------- -----------------------------------------------
| servo_1_reg[0:1] 0x10-0x11 | R/W | SERVO1 PULSE value(500~2500)
| servo_2_reg[2:3] 0x12-0x13 | R/W | SERVO2 PULSE value(500~2500)
| servo_3_reg[4:5] 0x14-0x15 | R/W | SERVO3 PULSE value(500~2500)
| servo_4_reg[6:7] 0x16-0x17 | R/W | SERVO4 PULSE value(500~2500)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_ADC_REG | 0x20-0x21
| ------------------------------------------------- -----------------------------------------------
| portb_adc_reg[0:1] 0x20-0x21 | R | PPORTB ADC value(0~4095)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_OUTPUT_REG | 0x30
| ------------------------------------------------- -----------------------------------------------
| portb_output_reg[0] 0x30 | R | PPORTB Output Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -
/*------------------------------------------------ -------------------------------------------------- */
| PPORTB_INPUT_REG | 0x31
| ------------------------------------------------- -----------------------------------------------
| portb_input_reg[0] 0x31 | R | PPORTB Input Digital value(0/1)
/*------------------------------------------------ -------------------------------------------------- -動画
- Hat CBack Driver を使用した 4 輪小型車の製作
Page Tools