

PuppyC
SKU:K035


説明
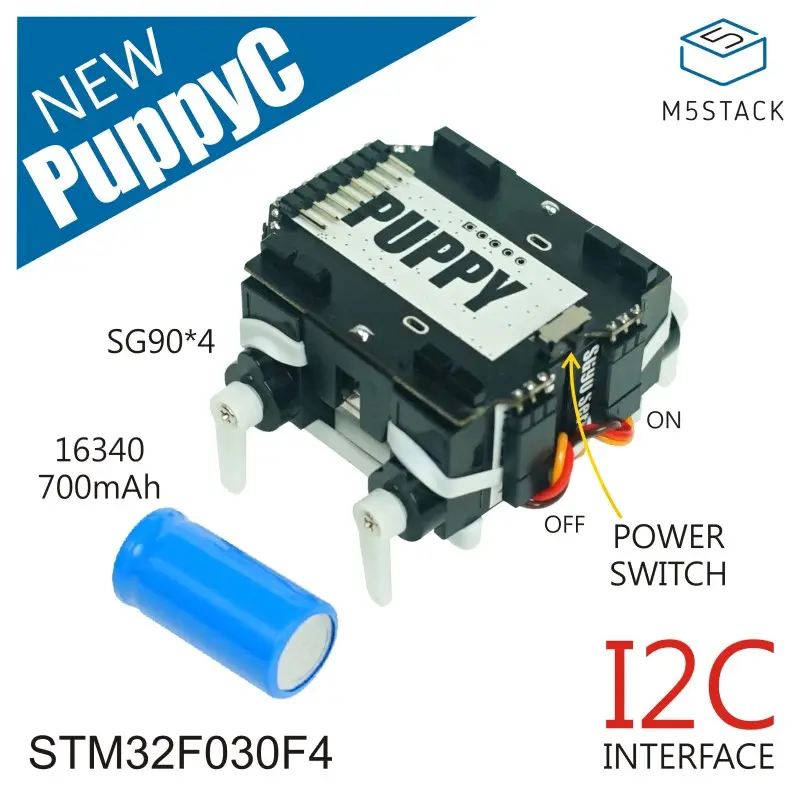
PuppyCは、M5StickC と互換性のあるプログラマブルな 4 足歩行ロボットベースです。STM32F030F4 マイクロコントローラ、SG90 マイクロサーボ 4 個、バッテリーホルダー、独立したスイッチが搭載されています。
StickC はプログラミング後、I2C プロトコル (0x38) で PuppyC と通信し、ステアリングの動きを制御します。
接触面積が小さいため動きが遅く、柔らかい表面でも摩擦力ができるだけ大きくなるように制御します。
この製品は現在 EOL です。
特徴
- プログラマブルロボット
- サーボコントローラ
- 4 足歩行
- サーボ角度範囲:0~180
アプリケーション
- ペットロボット
- リモコンロボット
- スマートトイ、コグニティブトイ
含まれるもの
- 1x PuppyC base
- 1x 16340 Battery(700mAh)
- 4x SG90 Servo
仕様
| 仕様 | パラメータ |
|---|---|
| MCU | STM32F030F4P6 |
| 通信プロトコル | I2C:0x38 |
| 製品重量 | 58g |
| 梱包重量 | 108g |
| 製品サイズ | 52 x 60 x 35mm |
| 梱包サイズ | 106 x 66 x 42mm |
ソフトウェア
Arduino
UiFlow1
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| PuppyC Easyloader | download | / |