
Module13.2 Stepmotor Driver
SKU:M039




説明
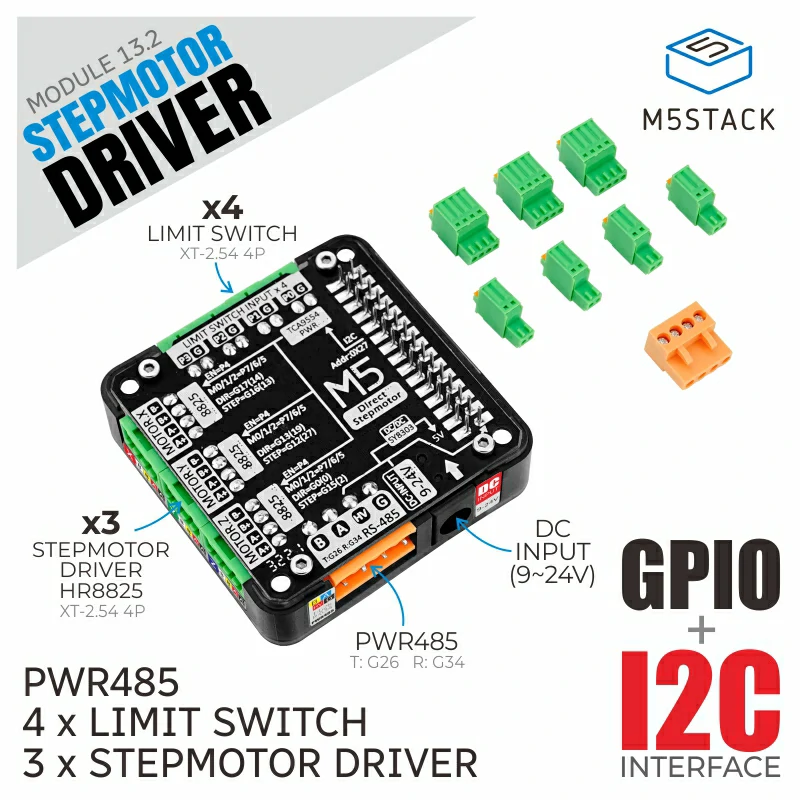
Module13.2 Stepmotor Driver は、M5 メインコントローラに対応するステッピングモータードライバーであり、HR8825 ステッピングモータードライバチップソリューションを採用し、3 系統のバイポーラ型ステッピングモーター制御インターフェースを提供します。本ドライバーを M5 メインコントローラとスタックすることで、メインコントローラ内部の ESP32 が直接信号を生成し、ドライバチップと直結して、独立制御や多軸モーター連動を実現できます。モジュールには TCA9554 IO 拡張チップを統合し、4 系統の入力信号端子 + 3 系統のステッピングモーター細分化制御 + 1 系統のドライバチップイネーブル制御 を提供。I2C インターフェースによる制御で、これら 8 つの拡張 IO の状態を監視・制御でき、外部リミットスイッチの接続、動的細分化調節、モーターのブレーキ機能に利用可能です。PWR485 通信インターフェース(RS485+9-24V 電源入力)および DC-JACK も統合され、通信と同時に柔軟な電源供給が可能です。UIFlow のグラフィカルプログラミング、ESP32-GRBL ファームウェア、Web コントロールに対応し、信号出力の容易な設定とステッピングモーターのより精密な制御を実現します。本モジュールは、プリンター、ロボットアームなど各種ステッピングモーターのモーションコントロールシーンに適用できます。
注意事項
特徴
- 3 軸 HR8825 ステッピングモータードライバ
- バイポーラ型ステッピングモーター対応
- 各チャンネルに電流調整用ポテンショメータ内蔵、最大駆動電流 1.5A
- 多様な細分化モード対応、最大
1/32STEP 細分化 - 複数系統の信号入力インターフェース
- PWR485 通信インターフェース(RS485+9-24V 電源入力)
- DC-JACK 端子入力(9-24V)
- DC-DC 内蔵、9-24V→5V 変換回路を一体化
- 開発プラットフォーム:
- Arduino、UIFlow
含まれるもの
- 1 x Module13.2 Stepmotor Driver
- 4 x 2.54-2P 端子
- 3 x 2.54-4P 端子
- 1 x 3.96-4P 端子
アプリケーション
- プリンター
- スキャナー
- CNC 彫刻機コントロール
- モーションモジュールコントロール
仕様
| 仕様 | パラメータ |
|---|---|
| ステッピングモータードライバ IC | HR8825 |
| IO 拡張 IC | TCA9554 |
| 通信インターフェース | I2C 通信 @ 0x27 |
| 対応マイクロステップモード | FULL、1/2、1/4、1/8、1/16、1/32 |
| 単チャンネル最大駆動電流 | 1.5A |
| 入力信号端子仕様 | 2.54-2P |
| モーター接続端子仕様 | 2.54-4P |
| RS485 接続端子仕様 | 3.96-4P |
| 製品サイズ | 54.2 x 54.2 x 13.2mm |
| 製品重量 | 40.0g |
| 梱包サイズ | 95.0 x 65.0 x 25.0mm |
| 梱包重量 | 60.0g |
操作説明
細分化 / マイクロステップ真値表
| M2 | M1 | M0 | 分解能 |
|---|---|---|---|
| 0 | 0 | 0 | FULL |
| 0 | 0 | 1 | 1/2 |
| 0 | 1 | 0 | 1/4 |
| 0 | 1 | 1 | 1/8 |
| 1 | 0 | 0 | 1/16 |
| 1 | 0 | 1 | 1/32 |
| 1 | 1 | 0 | 1/32 |
| 1 | 1 | 1 | 1/32 |
TCA9554 レジスタ
I2C Addr: 0x27
ステータスを読み取る際はレジスタ0x00、書き込み時はレジスタ0x01を使用します。レジスタ0x02で対応する bit を 1 に設定すると極性反転、0 の場合は反転せず、レジスタ0x03の対応 bit を 1 に設定すると入力モード、0 は出力モードとなります。下記の表は、各レジスタバイトのビットに対応するピンの関係です。
| Bit | 内容 | R/W |
|---|---|---|
| 7 | P7 細分化調節 M0 | R/W |
| 6 | P6 細分化調節 M1 | R/W |
| 5 | P5 細分化調節 M2 | R/W |
| 4 | P4 DRV EN ドライバイネーブル | R/W |
| 3 | P3 入力信号 3 | R/W |
| 2 | P2 入力信号 2 | R/W |
| 1 | P1 入力信号 1 | R/W |
| 0 | P0 入力信号 0 | R/W |
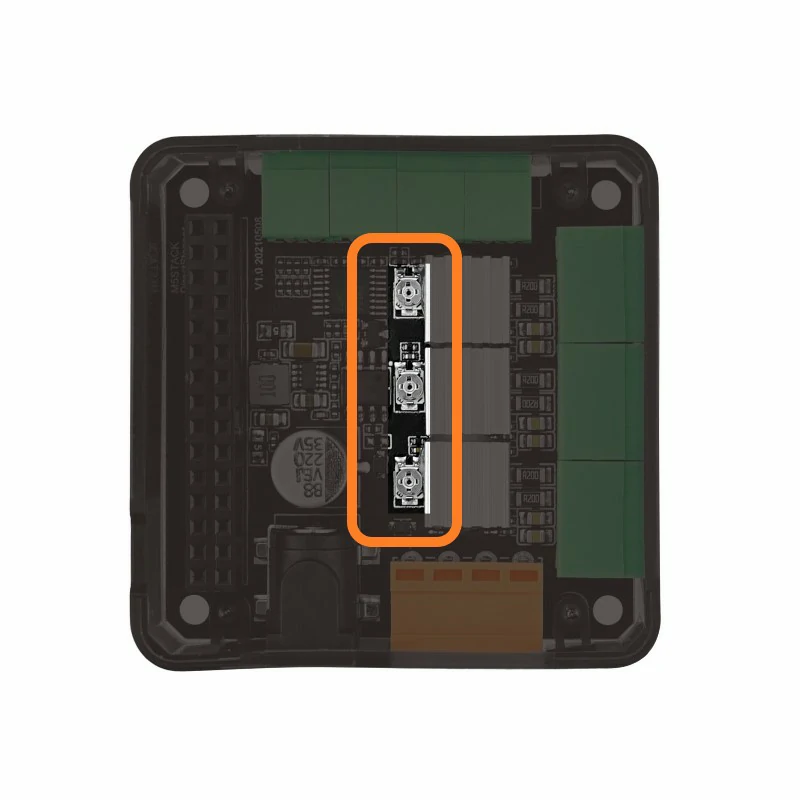
ドライブ電流調節
ステッピングモーターの仕様によって必要な駆動電流が異なるため、モジュール上の金属ダイヤルで電流出力の調整が可能です。モーターの過熱や損傷を防ぐため、調整はゆっくりと行い、モーターの状態を観察する、または電流計を接続して適切な駆動電流を判断してください。
ピンマップ
M5-Bus
| PIN | LEFT | RIGHT | PIN |
|---|---|---|---|
| GND | 1 | 2 | |
| GND | 3 | 4 | |
| GND | 5 | 6 | |
| 7 | 8 | RS485_TX | |
| 9 | 10 | ||
| 11 | 12 | 3V3 | |
| 13 | 14 | ||
| STEP_X | 15 | 16 | DIR_X |
| SDA | 17 | 18 | SCL |
| 19 | 20 | ||
| STEP_Y | 21 | 22 | DIR_Y |
| STEP_Z | 23 | 24 | DIR_Z |
| HPWR | 25 | 26 | RS485_RX |
| HPWR | 27 | 28 | 5V |
| HPWR | 29 | 30 |
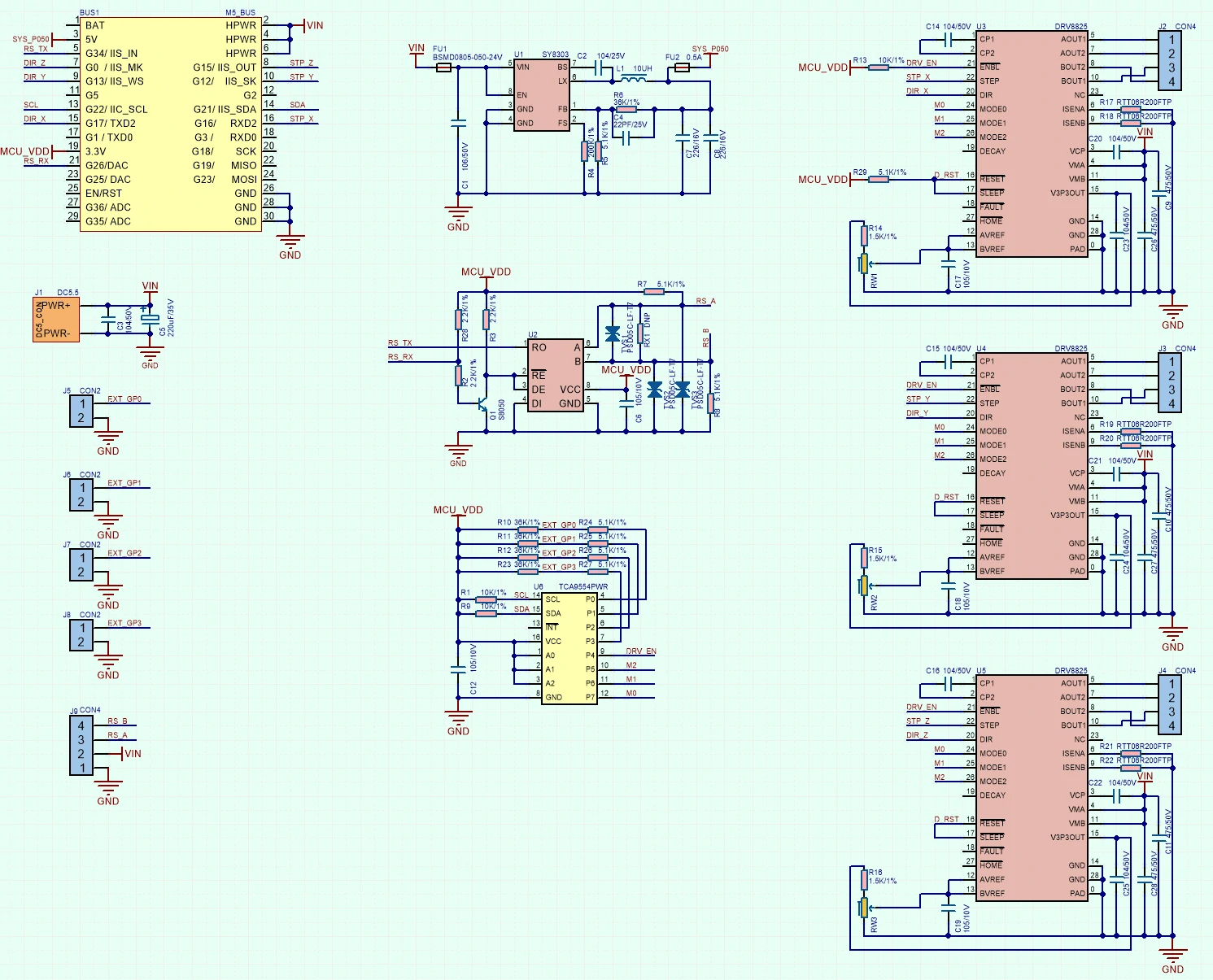
回路図
データシート
ソフトウェア
Arduino
1.0.3バージョンを使用する必要があります。これより新しいバージョンでは正常にコンパイルできません。使用方法や WEB-UI コントロールの詳細はESP32-GRBL-WIKIを参照してください。UiFlow1
動画
製品比較
| 機能 | GRBL 13.2 MODULE | STEPMOTOR DRIVER |
|---|---|---|
| 制御方式 | I2C 通信 | パルス信号 |
| ファームウェア | オンボード STM32、GRBL ファームウェア内蔵 | ファームウェアなし、ESP32 直接信号駆動 |
| モジュール積層数 | 2 | 1 |
| ドライバチップ | DRV8825 | HR8825 |
| 細分化調節 | ディップスイッチ | TCA9554 チップ制御 |
| インターフェース | 3 系統リミットスイッチインターフェース | 4 系統カスタム信号入力 + RS485 通信インターフェース |