

Unit Joystick
SKU:U024






説明
Joystickはジョイスティック制御入力ユニットです。I2C 通信インターフェースを採用し、3 軸制御信号入力 (X/Y 軸オフセットアナログ入力、Z 軸キーデジタル入力) をサポートします。ゲームやロボット制御などのアプリケーションシーンに適しています。
この製品は現在生産中止となっています。
特徴
- 3 軸入力。
- X/Y 軸オフセットアナログ入力
- Z 軸キーデジタル入力
- LEGO 互換穴 2 つ
- 開発プラットフォーム Arduino、UIFlow (Blockly、Python)
含まれるもの
- 1x ジョイスティックユニット
- 1x HY2.0-4P ケーブル
アプリケーション
- ゲームコントローラー
- ロボットのリモコン
仕様
| 仕様 | パラメータ |
|---|---|
| 通信プロトコル | I2C: 0x52 |
| X、Y 軸オフセット出力値 | 0~255 |
| Z 軸ボタン出力値 | 0/1 |
| 製品重量 | 11g |
| 梱包重量 | 27g |
| 製品サイズ | 48×24×32mm |
| 梱包サイズ | 75×45×30mm |
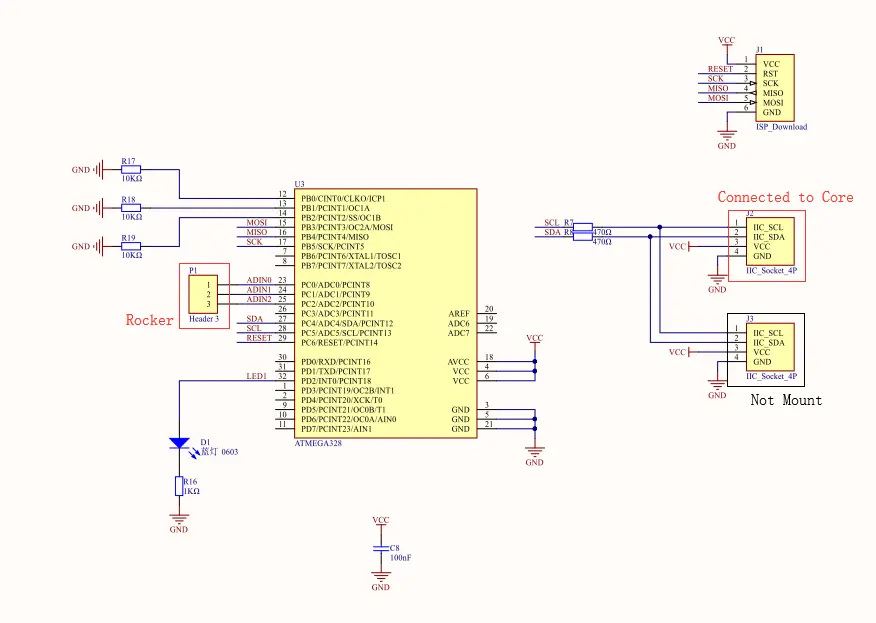
回路図
ピンマップ
Unit Joystick
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.A | GND | 5V | SDA | SCL |
ソフトウェア
Arduino

UiFlow1
UiFlow2
通信プロトコル
- プロトコルタイプ: I2C
- I2C アドレス: 0x52
JOYSTICK REG 0x52
| REG | len | 説明 | 返り値 |
|---|---|---|---|
| 0x52 | 3 | ジョイスティック状態読み取り | [0] X 値 [1] Y 値 [2] ボタン状態 |
Easyloader
| Easyloader | ダウンロードリンク | 備考 |
|---|---|---|
| Unit Joystick Easyloader | download | / |
動画
- ジョイスティックの XY データおよびボタン状態を表示。