Stepmotor Driver Module13.2 v1.1

描述
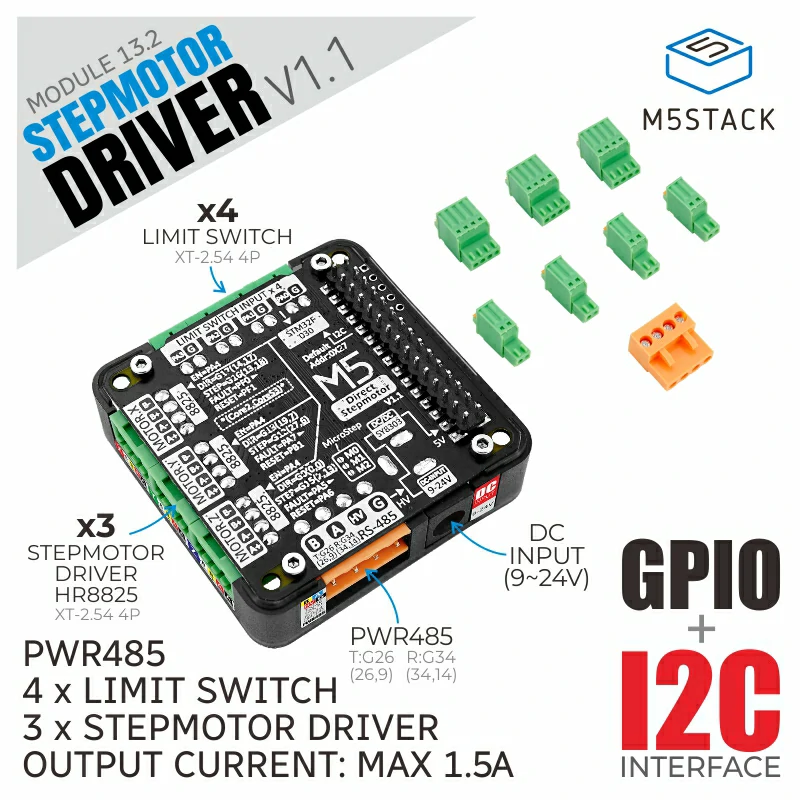
Stepmotor Driver Module13.2 V1.1是一款适配M5主控的步进电机驱动器, 采用STM32+HR8825步进电机驱动方案, 提供3路双极步进电机控制接口。将该驱动器与M5主控堆叠后, 由主控内部ESP32产生信号直连驱动芯片, 能够实现独立控制或是多轴电机联动。模块集成STM32F030F4P6芯片充当IO拓展,提供4组输入信号端子 、1组驱动芯片使能控制,通过I2C通讯, 能够控制和监听驱动芯片的复位与状态, 可用于外接限位开关、电机制动功能。模块上含3个焊盘控制3组步进电机的细分模式,实现步进电机的细分调节。集成PWR485通信接口(RS485 + 9-24V电源输入) 与DC-JACK, 能够用于通信的同时, 供电方式也将更加灵活。支持UIFlow图形化编程, 可轻松配置信号输出, 对步进电机实现更加精准的控制。该模块适用于多种步进电机运动控制场景,如打印机,机械臂等。
注意:
使用时禁止带电插拔电机, 一切操作请将设备断电后进行, 避免损坏模块。
使用时禁止带电插拔电机, 一切操作请将设备断电后进行, 避免损坏模块。
产品特性
- STM32F030F4P6@: ARM® 32-bit Cortex™-M0 CPU
- 三轴HR8825步进电机驱动器
- 适用于双极步进电机
- 每路带电流调节电位器,驱动电流可达1.5A
- 支持多种细分模式, 最大可达1/32 STEP细分
- 4组信号输入接口
- PWR485通信接口(RS485 + 9-24V电源输入)
- DC-JACK 端子输入(9-24V)
- 开发平台:Arduino、UIFlow
包含
- 1x StepMotor Driver v1.1
- 4x 2.54-2P端子
- 3x 2.54-4P端子
- 1x 3.96-4P端子
应用
- 打印机
- 扫描仪
- CNC雕刻机控制
- 运动模组控制
规格参数
| 规格 | 参数 |
|---|---|
| IO拓展芯片 | STM32F030F4P6 |
| 步进电机驱动芯片 | HR8825 |
| 支持细分模式 | FULL、1/2、1/4、1/8、1/16、1/32 |
| 单通道最大驱动电流 | 1.5A |
| 输入信号端子规格 | 2.54-2P |
| 电机接线端子规格 | 2.54-4P |
| RS485接线端子规格 | 3.96-4P |
| 工作温度 | 0-40°C |
| 产品尺寸 | 54.2 * 54.2 * 13.2mm |
| 包装尺寸 | 95 * 65 * 25mm |
| 产品重量 | 40g |
| 包装重量 | 60g |
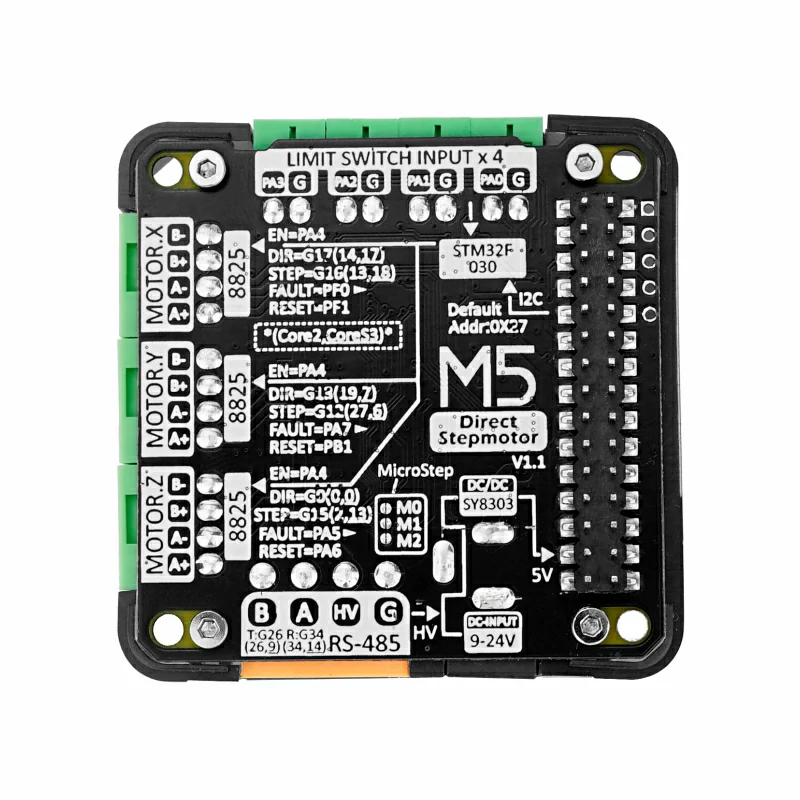





细分/微步真值表
| M2 | M1 | M0 | 分辨率 |
|---|---|---|---|
| 0 | 0 | 0 | FULL |
| 0 | 0 | 1 | 1/2 |
| 0 | 1 | 0 | 1/4 |
| 0 | 1 | 1 | 1/8 |
| 1 | 0 | 0 | 1/16 |
| 1 | 0 | 1 | 1/32 |
| 1 | 1 | 0 | 1/32 |
| 1 | 1 | 1 | 1/32 |
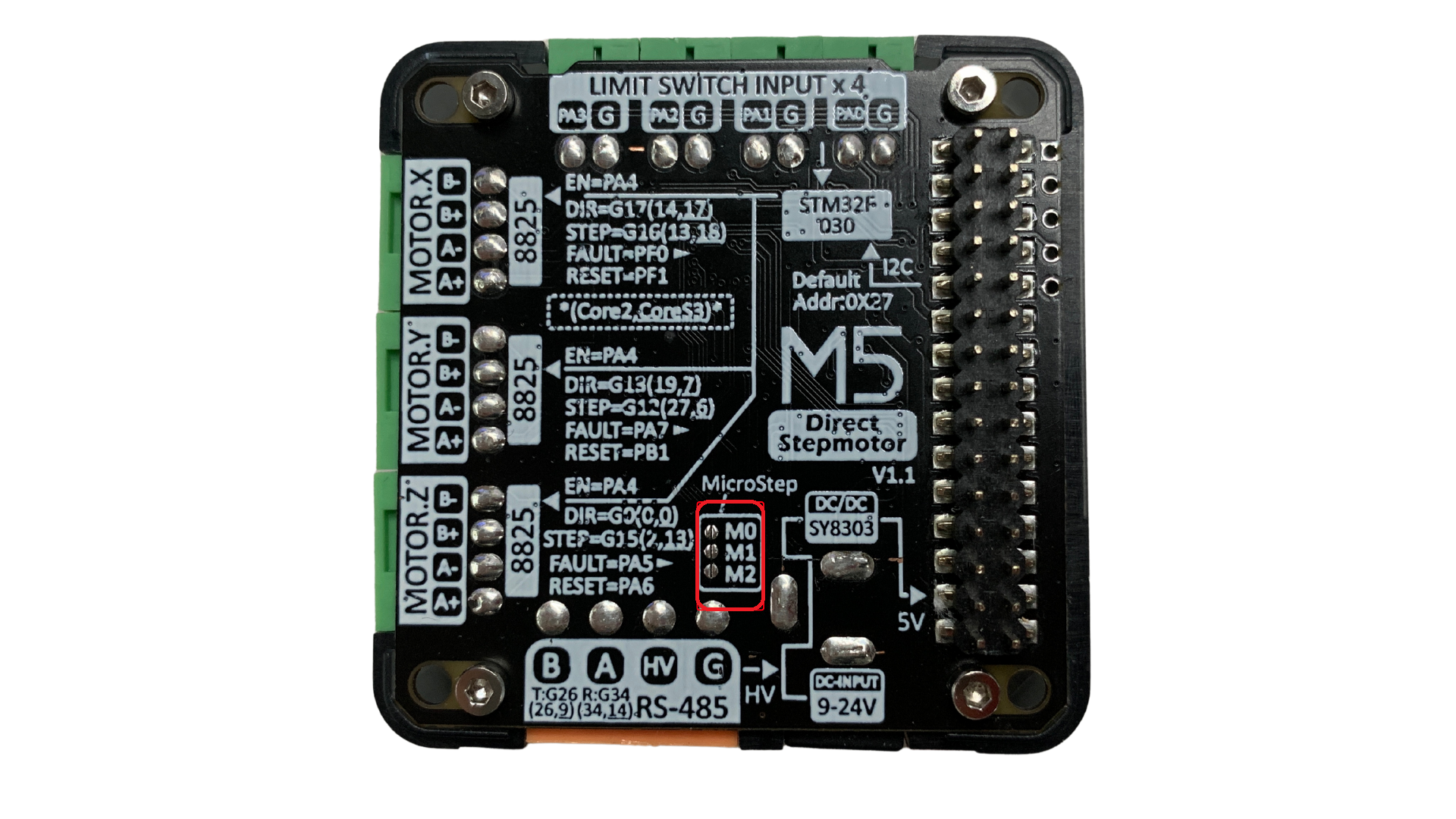
调节细分模式麻烦用电烙铁焊接相关的焊盘连接。
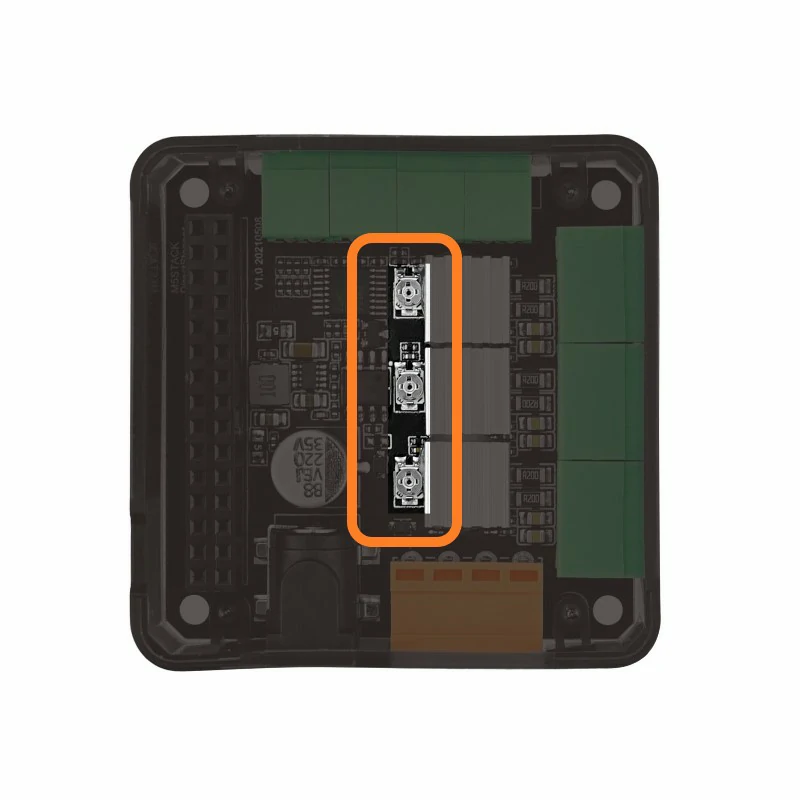
驱动电流调节
步进电机规格不同,所需要的驱动电流也可能有所不同,使用时可以通过模块上的金属旋钮调整电流输出。为防止电机过热或损坏,调整时需缓慢调整旋钮,观察电机状态或接入电流计来判断合适的驱动电流。
相关链接
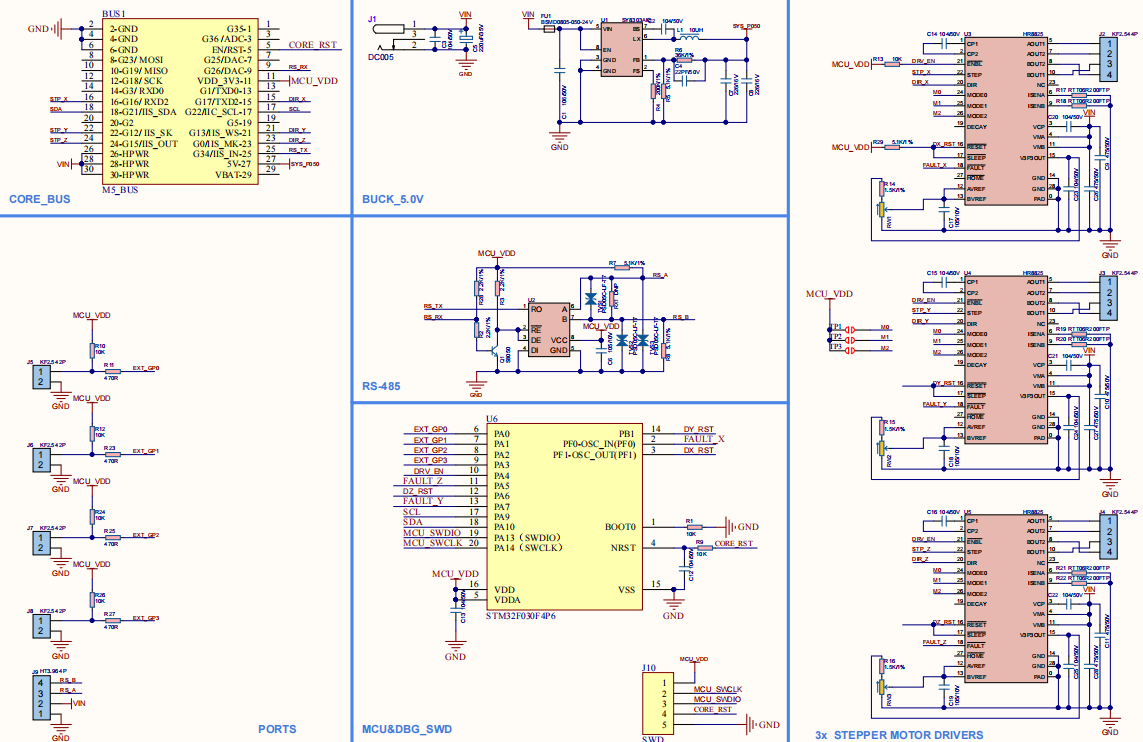
原理图
相似产品比较
| 功能 | GRBL 13.2 MODULE | STEPMOTOR DRIVER | STEPMOTOR DRIVER V1.1 |
|---|---|---|---|
| 控制方式 | I2C通信 | 脉冲信号 | 脉冲信号 |
| 固件程序 | 板载MEGA328,内置GRBL固件 | 无固件, 可通过ESP32直接信号驱动 | 板子STM32,内置固件 |
| 模块可堆叠数量 | 2 | 1 | 1 |
| 驱动芯片 | DRV8825 | HR8825 | HR8825 |
| 细分调节 | 拨码开关 | TCA9554芯片控制 | STM32芯片控制 |
| 接口 | 3组限位开关接口 | 4组自定义信号输入接口 + RS485通信接口 | 4组自定义信号输入接口 + RS485通信接口 |
例程
Arduino
UIFlow
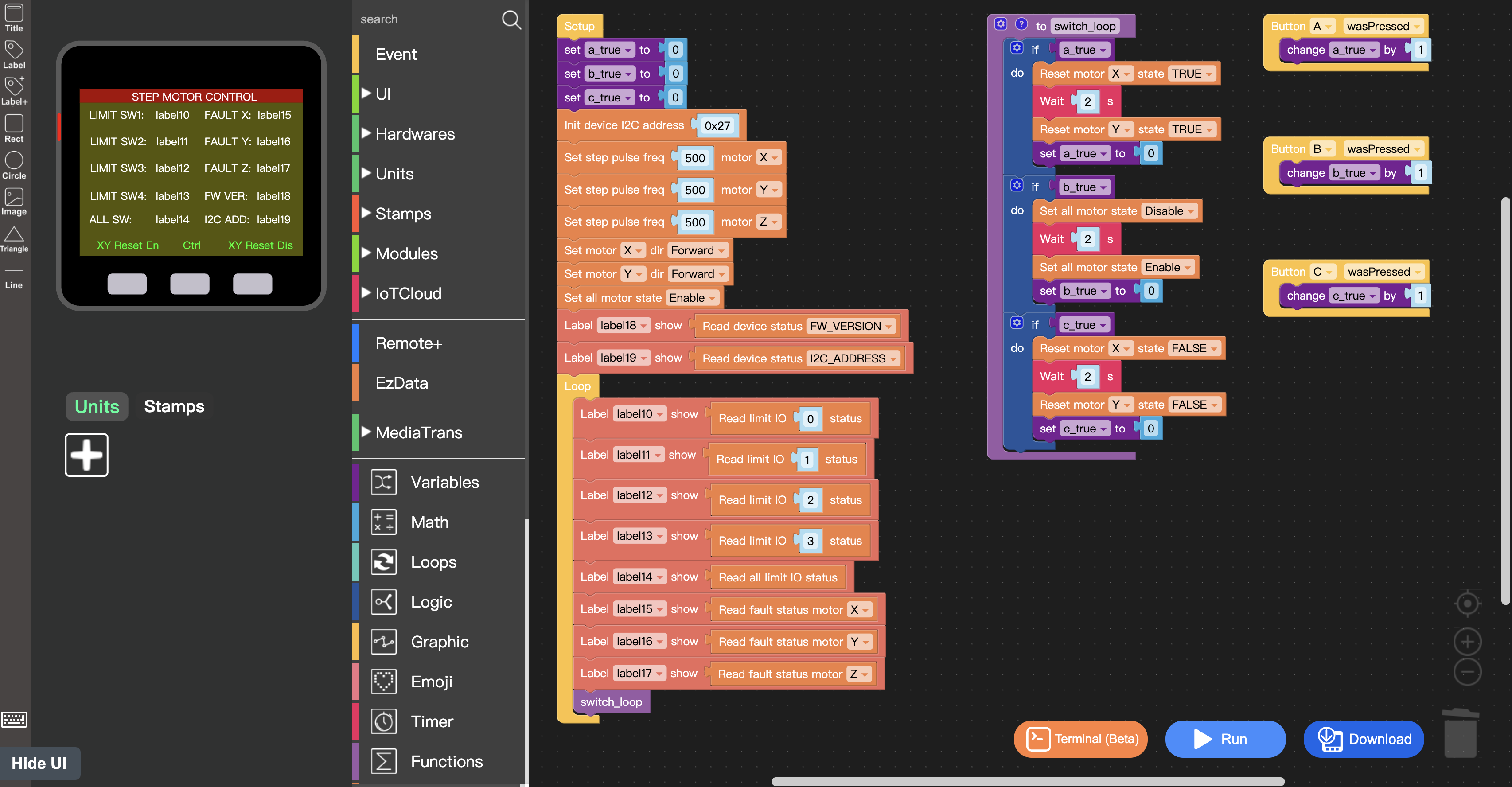
UIFlow块介绍
- 初始化i2c地址(默认0x27)

- 设置三个电机中的一个的pwm频率

- 设置单步细分模式

- 设置电机转动方向

- 设置所有的电机使能情况

- 设置单个舵机的使能情况

- 复位三个舵机中的一个

- 设置设备的i2c地址
- 读取所有io控制口输入的情况

- 读取4个输入口中的一个的状态

- 读取电机默认的状态

- 读取设备的固件版本

- 初始化串口通信

- 主设备尝试写入从设备的单线圈寄存器的地址的值

- 主设备正在尝试向一个从设备写入一个带符号的16位寄存器的值,该寄存器的地址是已知的,也知道要写入的设备的地址。该操作涉及一个单独的寄存器,而不是多个寄存器。

- 主设备正在尝试向一个从设备写入多个线圈的值,这些线圈的地址是连续的,即从"starting address"开始,共有多个线圈需要被写入。这些线圈的值是由"output value"参数指定的。

- 主设备正在尝试向一个从设备写入多个寄存器的值,这些寄存器的地址是连续的,即从"starting address"开始,共有多个寄存器需要被写入。这些寄存器的值是由"register value"参数指定的。如果这些寄存器是带符号的,则还需要指定"signed"参数来表示数据的正负性。

- 初始化设置modbus读取数据函数码的方式,从哪个地址开始,并设置读取的数量

- 写入数据操作,设置函数码。该操作要求从"start addr"地址开始写入"quantity"个寄存器或线圈的数据,写入的数据值为"value"。

- 将响应数据单元(ADU)存储在缓冲区中,现在需要将该缓冲区中的数据发送出去,以完成数据传输操作。
- 接收到一个请求数据单元(ADU)。

- 获取请求数据单元(ADU)中的功能码。

- 设置请求数据单元(ADU)中的功能码。

- 获取地址
- 获取传输的数量
- 在串口中写入字符串
- 写入带切换行数的字符串在串口中

- 设置串口输出的数据
- 读取所有数据
- 设置串口读取字节的数量
- 串口读取
- 保留缓存