RoverC-Pro


Description
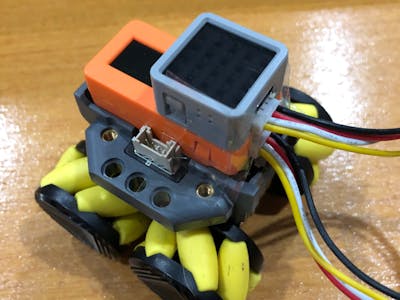
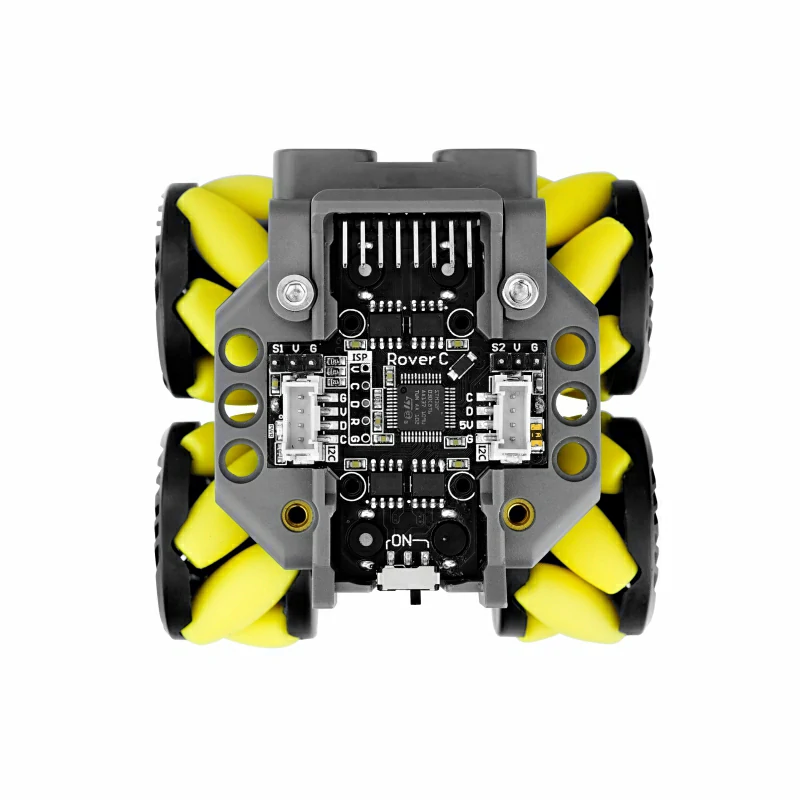
RoverC-Pro is a programmable Mecanum wheel omnidirectional mobile robot base. Compatible with M5StickC/M5StickC PLUS, it can be initialized by just inserting M5StickC/M5StickC PLUS. The main control chip is STM32F030C6T6, and it incorporates four N20 worm gear motors to drive the wheels directly by the motor driver.
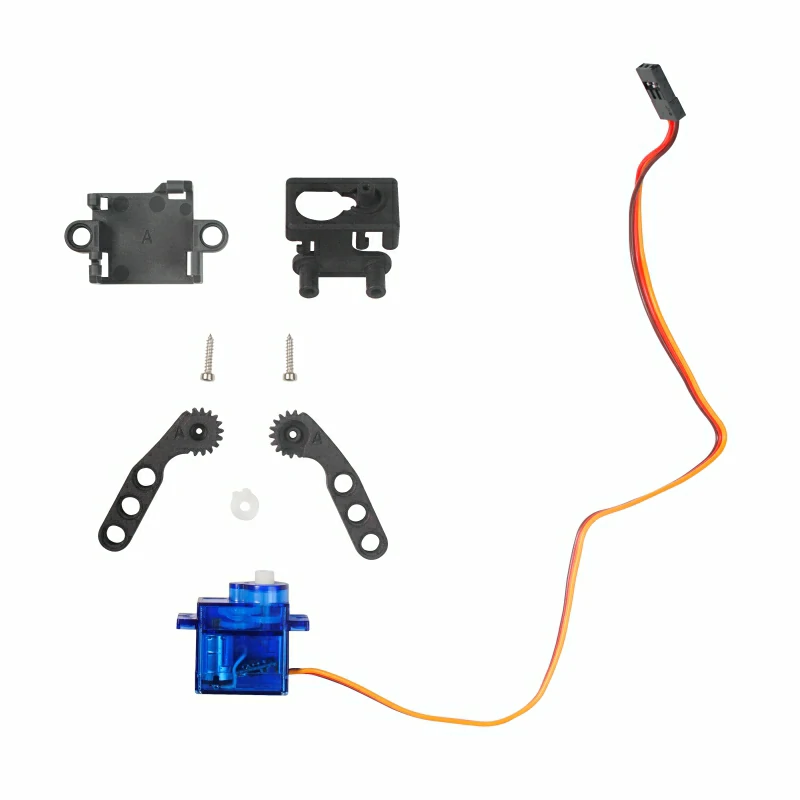
The PRO version provides a gripping mechanism controlled by a servo for gripping objects. The base provides two dedicated servo control drivers. In addition, it also provides two Grove-compatible I2C connectors to facilitate the expansion of other modules. The base is compatible with Lego and can be expanded structurally. There is an 16340 (700mAh) battery on the back, from which the battery can be replaced. It can be recharged through M5StickC/M5StickC PLUS. The power of the base is controlled by an independent switch.
Product Features
- I2C Address 0x38
- Remote Control
- Gripping mechanism
- Programmable
- Four-channel motor driver
- LEGO compatible
- Extra Grove ports for expansion
- Equipped with 16340(700mAh) battery holder
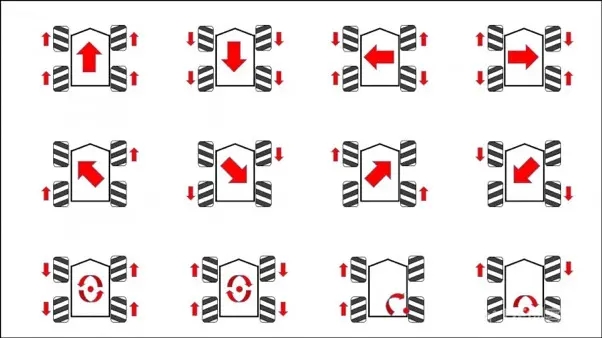
- Flexible movement in all directions
Include
- 1x RoverC base(includes 16340(700mAh) Battery)
- 1x Claw Kit
Applications
- Autonomous Rover
- Mini RC surveillance car
- Smart and cognitive toys
Specification
| Resources | Parameter |
|---|---|
| Communication protocol | I2C:0x38 |
| Net weight | 187g |
| Gross weight | 245g |
| Product Size | 120 x 75 x 58mm |
| Package Size | 115 x 85 x 65mm |





RoverC PRO and RoverC comparison
| / | RoverC PRO | RoverC |
|---|---|---|
| Servo Gripper | x1 | / |
| Servo Ext Port | x2 | / |
| Battery | Removable | Non-removable |
EasyLoader
EasyLoader is a concise and fast program writer, which has a built-in case program related to the product. It can be burned to the main control by simple steps to perform a series of function verification.
Press the ButtonA to hold the object and release the clamp after moving it back and forth
Pin Map
| M5StickC | GPIO26 | GPIO0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
Example
Arduino
1: This case uses RoverC and JoyC to realize wireless control through UDP communication. Please select the corresponding case program below according to the equipment you are using.
2: This case is a RoverC stand-alone control program, which is directly controlled by the main controller. Please select the corresponding case program below according to the equipment you are using.
Protocol
- Protocol type I2C
- I2C Address: 0x38
/*--------------------------------------------------------------------------------------------------*/
| ROVERC_MOTOR_REG | 0x00-0x03
| ------------------------------------------------------------------------------------------------
| motor_1_reg[0] | R/W | Motor1 Speed value(-127~127)
| motor_2_reg[1] | R/W | Motor2 Speed value(-127~127)
| motor_3_reg[2] | R/W | Motor3 Speed value(-127~127)
| motor_4_reg[3] | R/W | Motor4 Speed value(-127~127)
/*----------------------------------------------------------------------------------------------------
/*--------------------------------------------------------------------------------------------------*/
| ROVERC_SERVO_ANGLE_REG | 0x10-0x11
| ------------------------------------------------------------------------------------------------
| servo_1_reg[0] | R/W | SERVO1 Angle value(0-180)
| servo_2_reg[1] | R/W | SERVO2 Angle value(0-180)
/*----------------------------------------------------------------------------------------------------
/*--------------------------------------------------------------------------------------------------*/
| ROVERC_SERVO_PULSE_REG | 0x20-0x23
| ------------------------------------------------------------------------------------------------
| servo_1_pulse_reg[0] | R/W | SERVO1 PULSE H value
| servo_1_pulse_reg[1] | R/W | SERVO1 PULSE L value
| servo_2_pulse_reg[2] | R/W | SERVO2 PULSE H value
| servo_2_pulse_reg[3] | R/W | SERVO2 PULSE L value (pulse value:500-2500us)
/*----------------------------------------------------------------------------------------------------
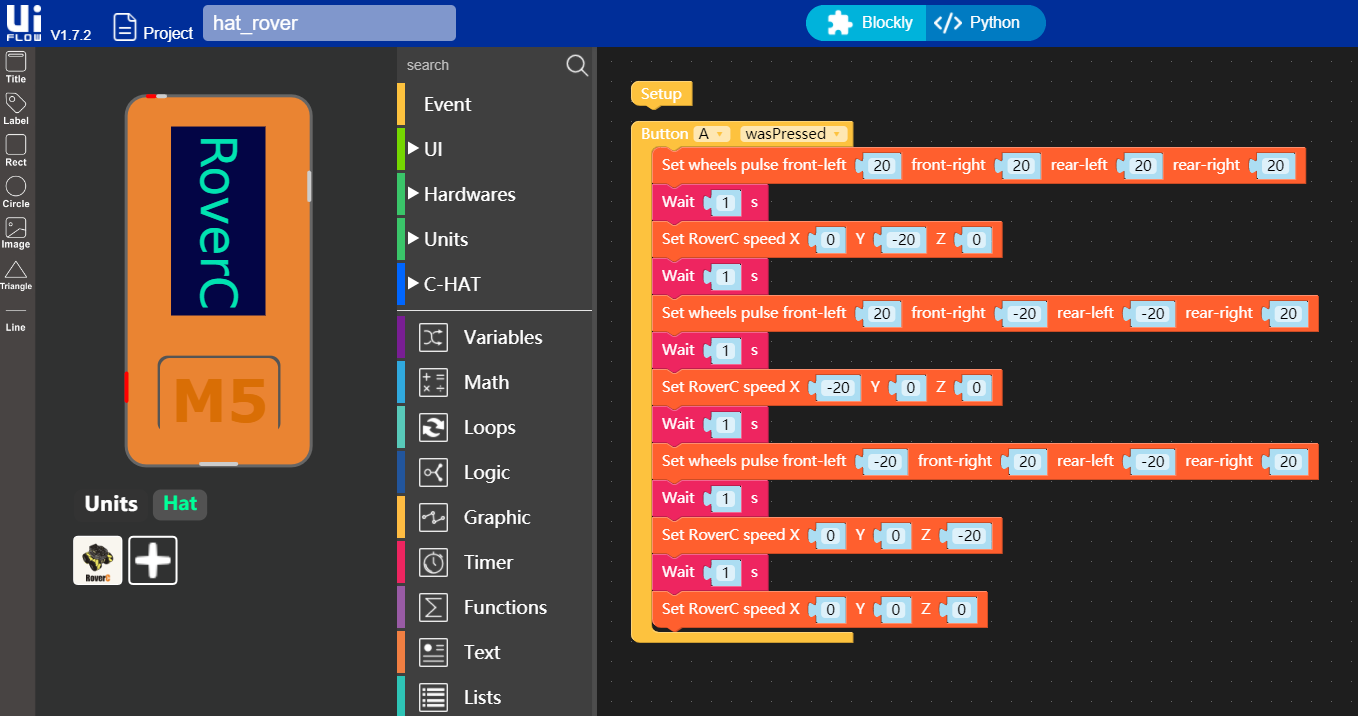
UIFlow