UIFlow Guide
UIFlow 1.0 Quick Start
2. Firmware & Program 1.0
UIFlow 1.0 Blockly
Event
UI
UIFlow 2.0 Quick Start
2. Firmware & Program 2.0
UIFlow 2.0 Blockly
Desktop IDE
BaseX
API
Control LEGO motors and servos
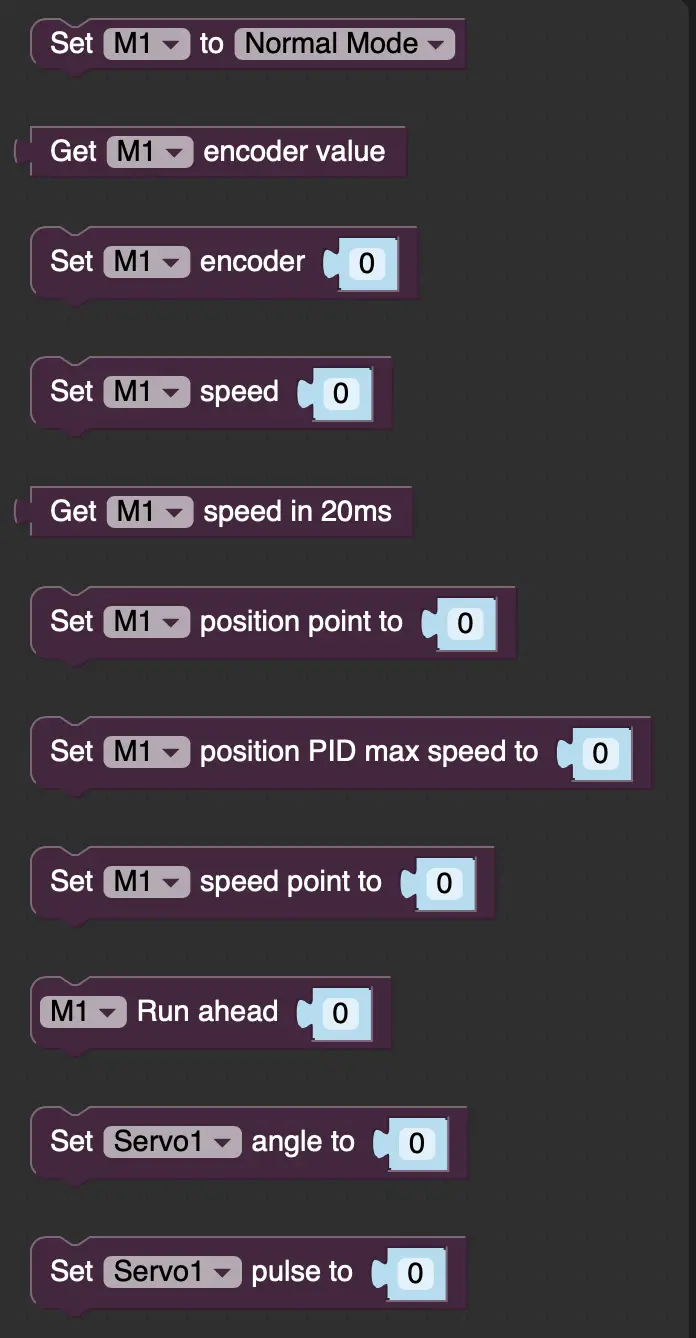
Set to Mode
Setting the motor mode (normal/position/speed)
Get encoder value
Getting the encoder value
Set encoder
Setting the encoder value
Set speed
Setting the motor speed (normal mode)
Get speed in 20ms
Get the speed of motor rotation in 20ms
Set position point to
Setting the motor position
Set position PID max speed to
Setting the position mode motor correction speed
Set speed point to
Setting the motor speed (speed mode)
Run ahead
Turn forward to the specified position
Set Servo angle to
Setting the servo angle
Set Servo pulse to
Setting the number of servo pulses
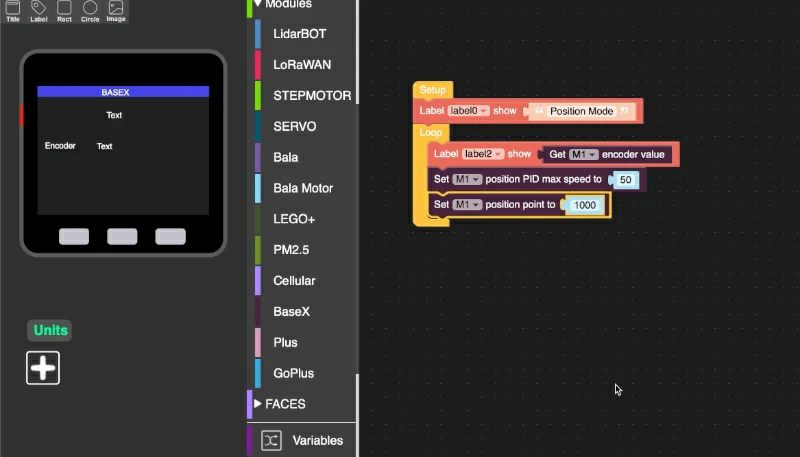
Usage
Set the motor to rotate 1000 at 50