
RoverC-Pro
SKU:K036-B








描述
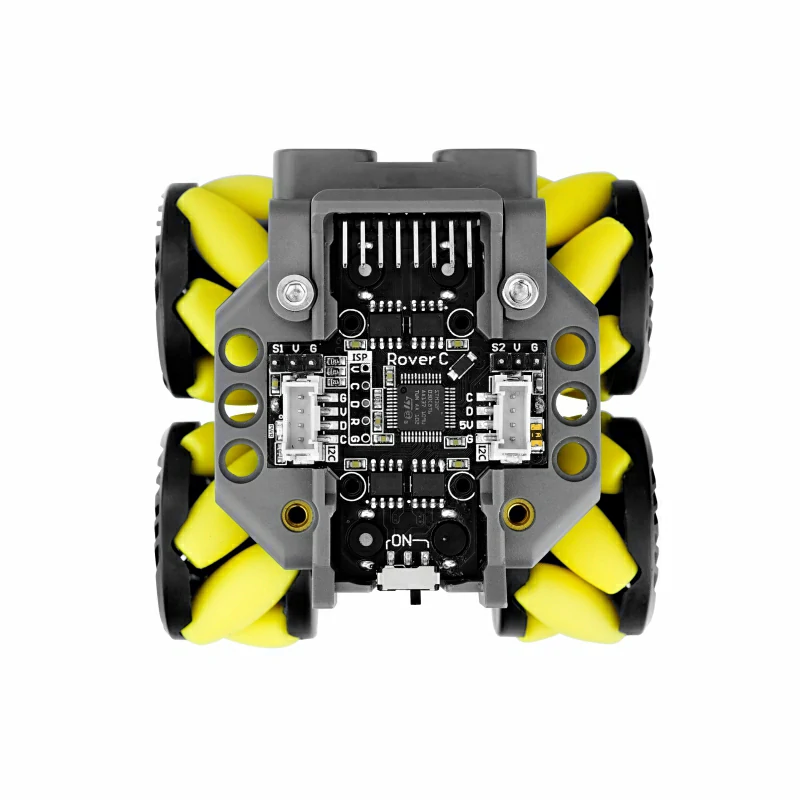
RoverC-Pro 是一款可编程麦克纳姆轮全向移动机器人底座。与 M5StickC/M5StickC PLUS 兼容,只需插入 M5StickC/M5StickC PLUS 即可使用。主控芯片为 STM32F030C6T6, 由四个 N20 蜗杆减速电机组成,由电机驱动器 L9110S 驱动。PRO 版本提供了一个由舵机控制的夹持机构,用于夹持物体。底座上提供了两个舵机接口。此外,还有两个 Grove 兼容的 I2C 接口,以便于扩展其他模块。底座与乐高孔兼容,在结构上可以扩展。背面有一个 16340 (700mAh) 的可更换充电电池。底座电池可通过 M5StickC/M5StickC Plus 进行充电。在底座尾部有一个电源开关和指示灯。
产品特性
- I2C 地址 0x38
- 可遥控
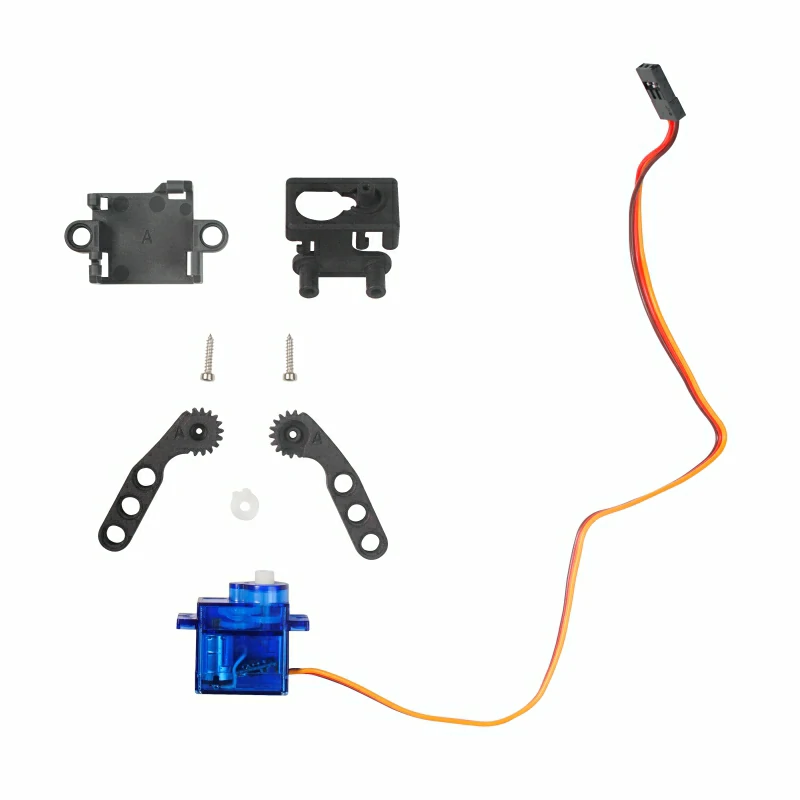
- 带有夹持结构
- 可编程
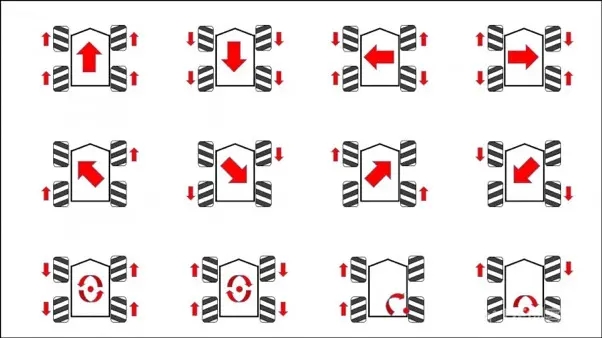
- 全方位灵活移动
- 四通道电机驱动器
- 兼容乐高
- 额外的 Grove 接口用于扩展
- 配备 16340 (700mAh)
包装内容
- 1 x RoverC-Pro
- 1 x 夹爪套件
应用场景
- 迷你侦察车
- 小型移动机器人
- 智能玩具
规格参数
| 规格 | 参数 |
|---|---|
| MCU | STM32F030C8T6 |
| 通信协议 | I2C:0x38 |
| 产品尺寸 | 120.0 x 75.0 x 58.0mm |
| 产品重量 | 169.3g |
| 包装尺寸 | 115.0 x 85.0 x 65.0mm |
| 毛重 | 245.0g |
管脚映射
| M5StickC | G26 | G0 | 5V | GND |
|---|---|---|---|---|
| RoverC HAT | SCL | SDA | 5V | GND |
| I2C① | SCL | SDA | 5V | GND |
| I2C② | SCL | SDA | 5V | GND |
结构文件
数据手册
软件开发
Arduino
1: 该案例使用 RoverC 和 JoyC, 通过 UDP 通信实现无线控制。 请据你所使用的设备选择下方对应的案例程序。
注意:开机后 RoverC 会显示 "M5AP+2 字节 mac 地址" 热点名称,同时 JoyC 会扫描到 RoverC 的 mac 地址名,长按 3 秒 JoyC 上的 M5StickC 的 Home 键,开始扫描小车的热点,即可配对成功。成功配对后屏幕左上角会高亮显示链接图标,同时屏幕显示摇杆数值。左摇杆上下控制前后,左右控制平移,右摇杆左右控制转向。
2: 该案例为 RoverC 单机控制程序,由主控直接控制。请据你所使用的设备选择下方对应的案例程序。
UiFlow1
通信协议
通讯类型:I2C
I2C 通讯地址: 0x38
Easyloader
| Easyloader | 下载链接 | 备注 |
|---|---|---|
| RoverC-Pro Easyloader | download | / |
相关视频
产品对比
| 产品对比 | RoverC PRO  | RoverC 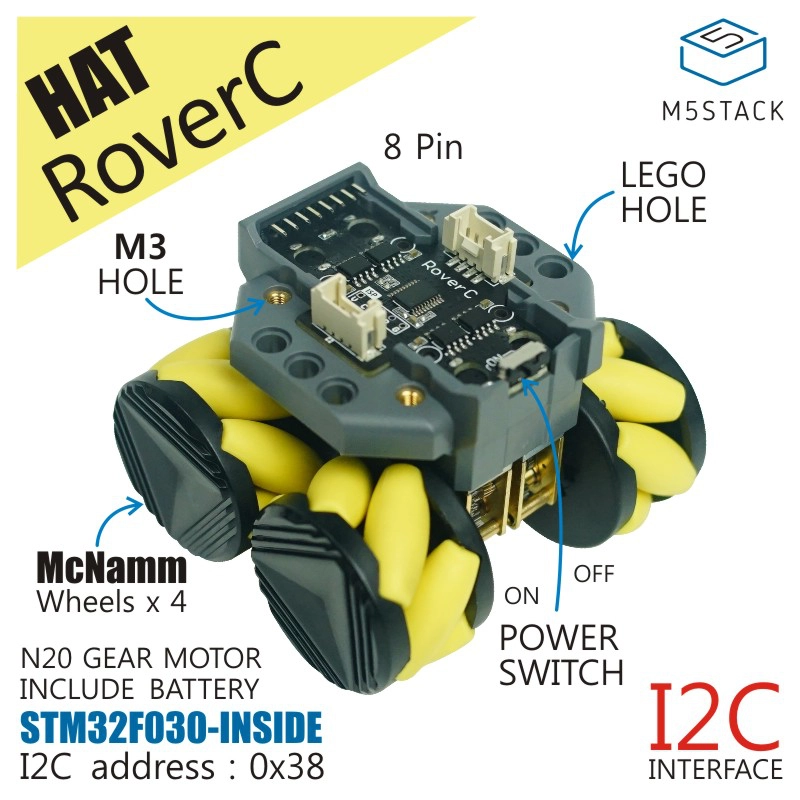 |
|---|---|---|
| 舵机爪手 | x1 | / |
| 舵机拓展接口 | x2 | / |
| 电池 | 可拆卸 | 不可拆卸 |
Page Tools