
Module COMX Zigbee
SKU:M031-Z





描述
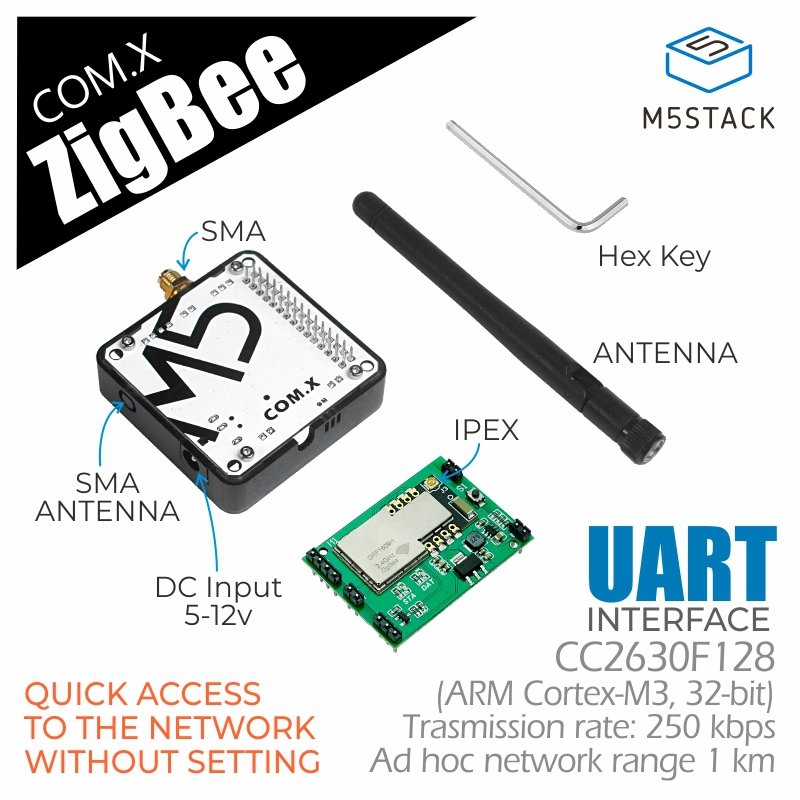
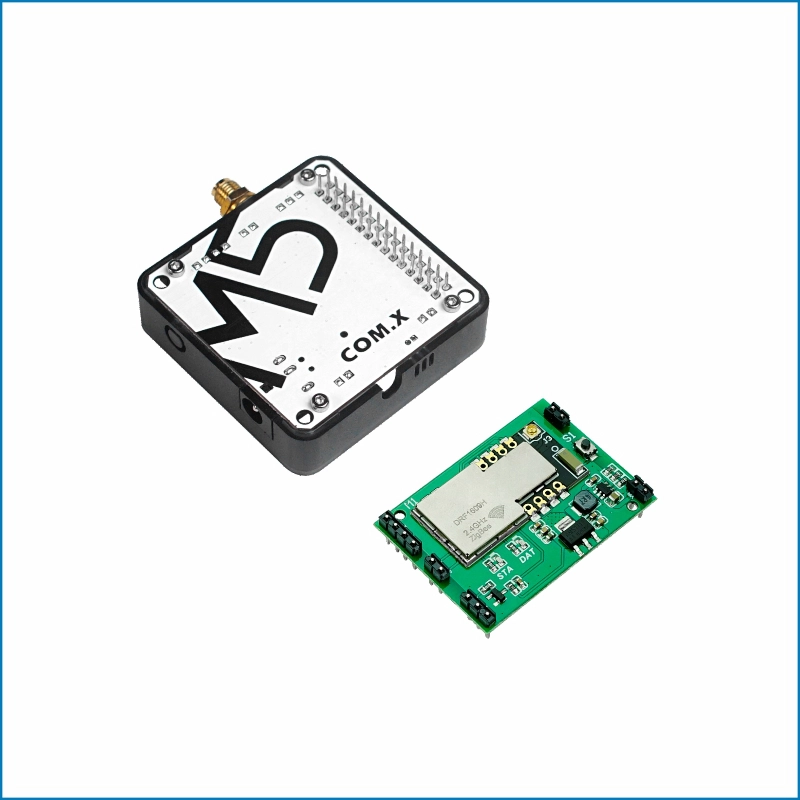
Module COMX Zigbee 是 M5Stack 推出的一款 Zigbee 自组网通讯模块。模块采用 CC2630F128 方案,内部集成 Zigbee 协议栈,开放串口通信接口。集成外部天线,单节点稳定通信距离可达 1km ,200 级 router 深度,通过 MESH 组网方式能够将你的物联网应用进行广范围的延展,兼具超低功耗与高灵敏度特性。Zigbee 网络可以支持数以百计的节点,并具有增强的安全特性。可为家庭和楼宇自动化提供完整且可互操作的物联网解决方案。
注意事项
兼容性
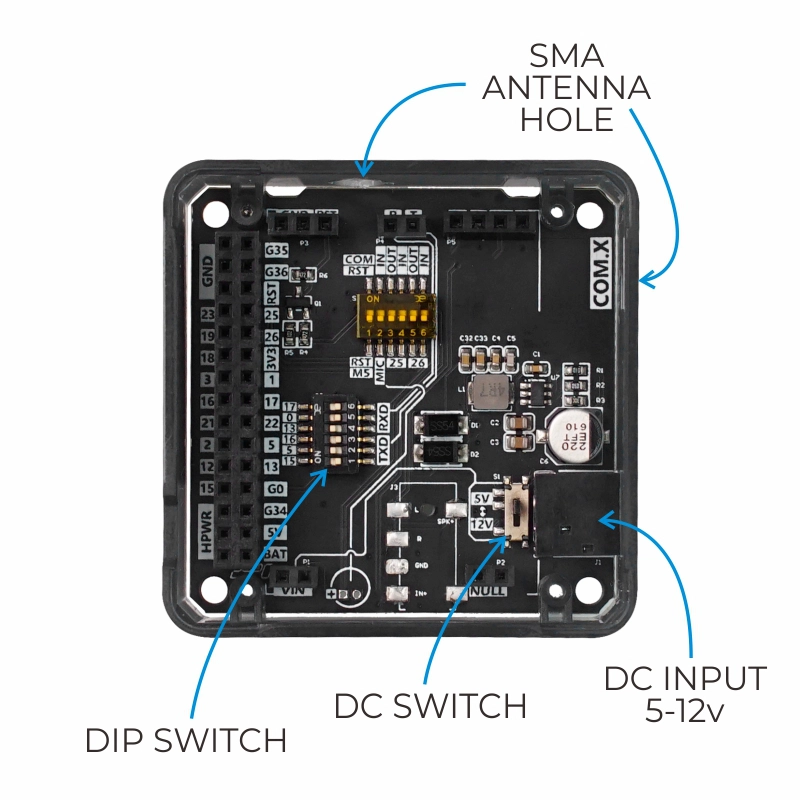
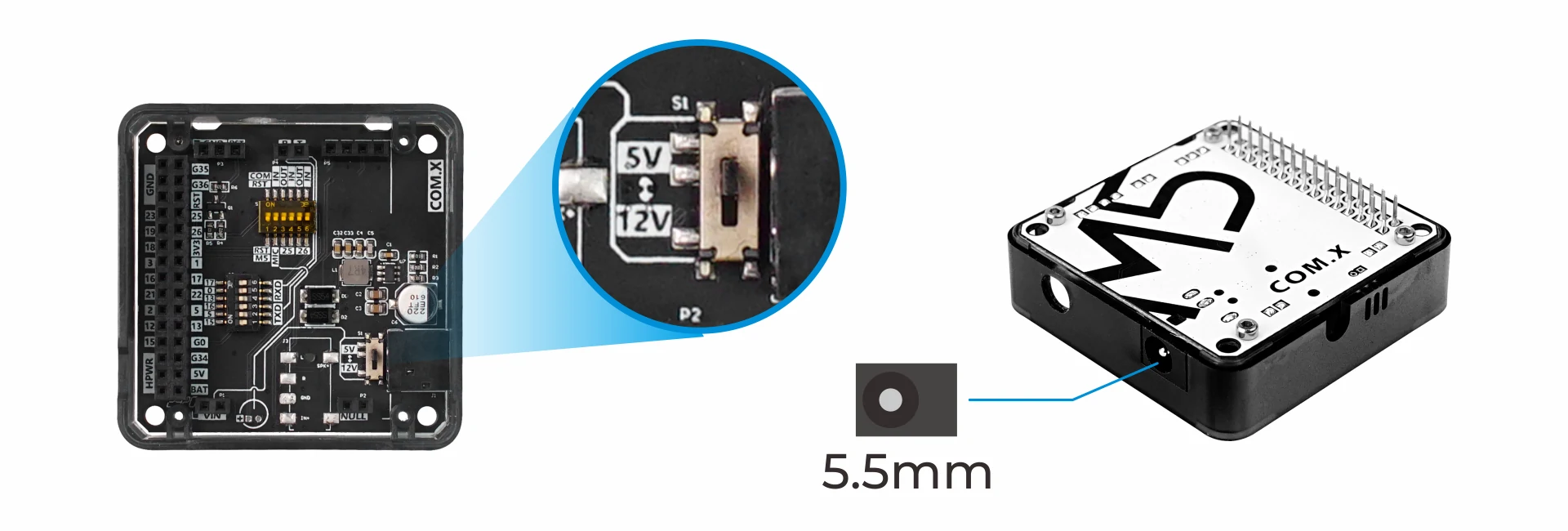
搭配 Fire 主控使用时候,由于 PSRAM 引脚(G16/G17)冲突,使用时候请将模块底座拨码开关引脚切换至 TX (G0/G13),RX (G5/G15)。
产品特性
- CC2630F128
- 免设置快速入网
- 初始化 coordinator 并配置 router 预设,可实现连按三次按键自动入网
- 串口通信
- 低功耗 (模组工作电流:25mA, 休眠 5uA)
- 动态路由维护,支持 200 级路由深度
- 传输速度 250Kbps
- 节点通信距离 1km
- UART 透明传输 / 广播 / P2P
包装内容
- 1 x Module COMX Zigbee
- 1 x SMA 天线
应用场景
- 智能家居
- 物联网采集节点
- 楼宇自动化
规格参数
| 规格 | 参数 |
|---|---|
| CC2630F128 | ARM Cortex-M3 32bit |
| 通讯方式 | UART 38400bps 8N1 (default) |
| 通信距离 | 1km (空旷地区) |
| 工作频率 | 2.4GHZ (2405MHz-2480MHz, 步长为 5MHz) |
| DC 接口规格 | 5.5mm |
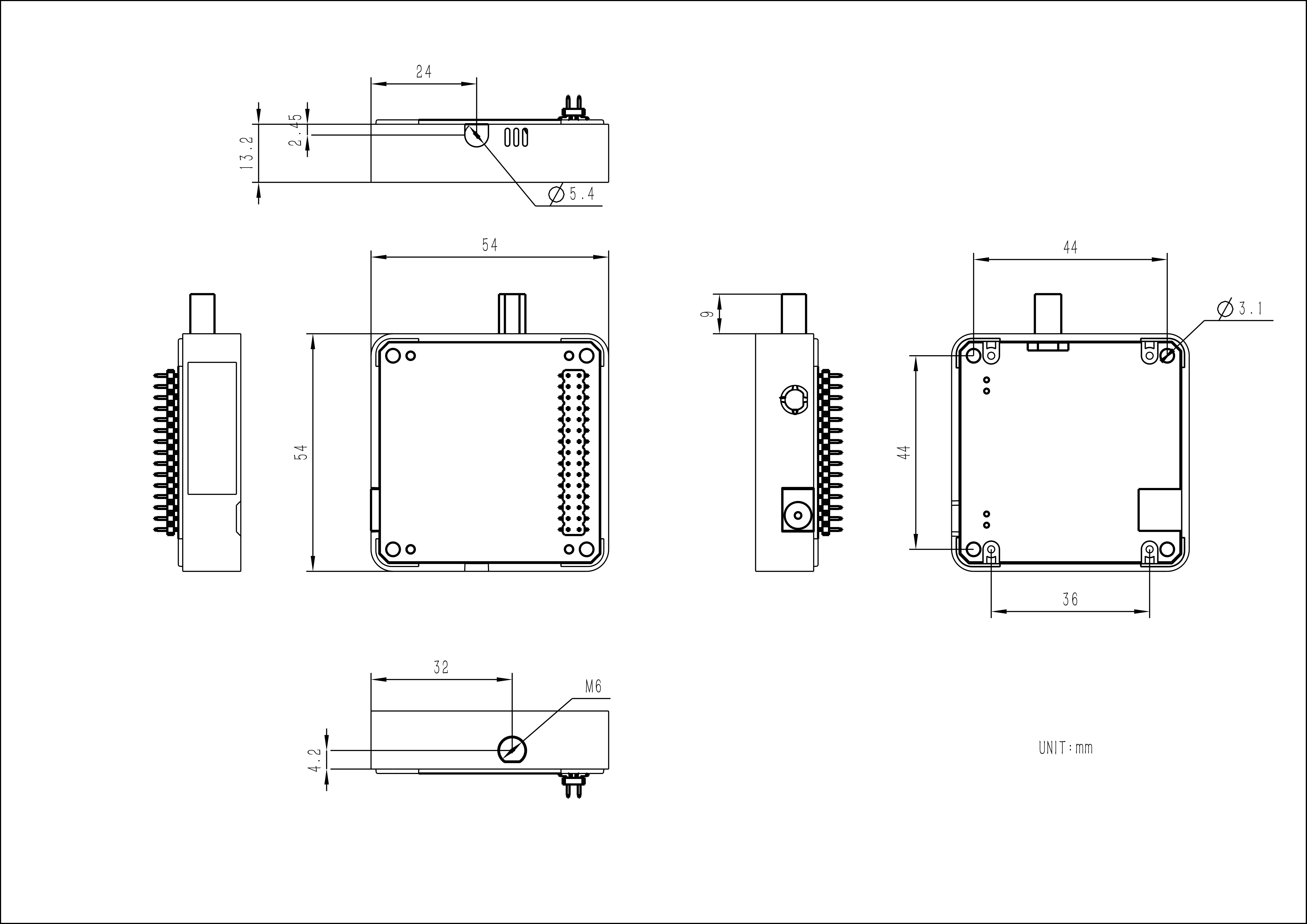
| 产品尺寸 | 54.0 x 54.0 x 13.2mm |
| 产品重量(含天线) | 37.0g |
| 包装尺寸 | 165.0 x 60.0 x 36.0mm |
| 毛重 | 70.0g |
操作说明
供电切换
模块底座带有 DC 电源输入接口,使用该接口接入电源请严格按照输入范围 (5-12V) 防止模块损坏。内部电源拨码开关可调节内部的端子 VIN 的电压水平,用于适配不同模块。
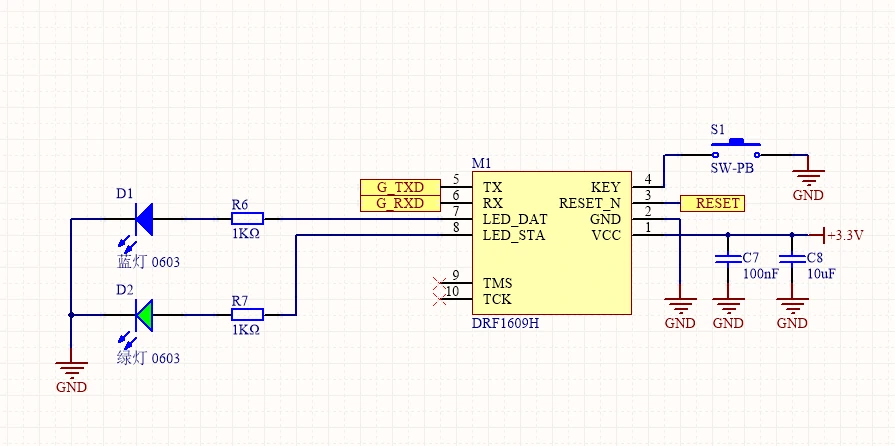
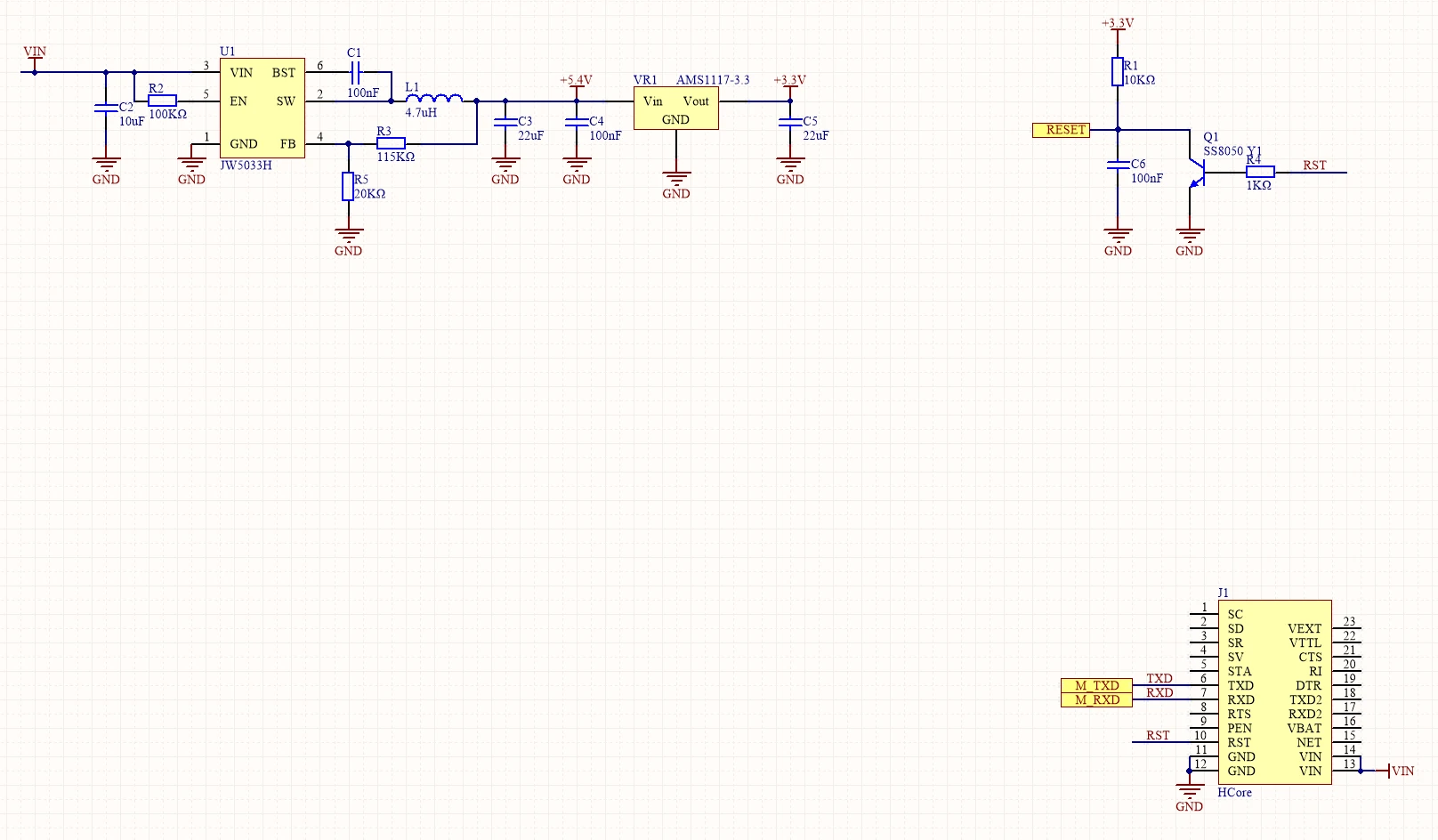
原理图
1/2
管脚映射
M5-Bus
Switch
下方 M5-Bus 中标记
SW 的引脚,可通过拨码开关进行切换,用于适配不同的主控设备。| PIN | LEFT | RIGHT | PIN |
|---|---|---|---|
| GND | 1 | 2 | |
| GND | 3 | 4 | |
| GND | 5 | 6 | |
| 7 | 8 | ||
| 9 | 10 | ||
| 11 | 12 | 3V3 | |
| 13 | 14 | ||
| TXD (SW) | 15 | 16 | RXD (SW) |
| 17 | 18 | ||
| 19 | 20 | TXD (SW) | |
| 21 | 22 | RXD (SW) | |
| TXD (SW) | 23 | 24 | RXD (SW) |
| 25 | 26 | ||
| 27 | 28 | 5V | |
| 29 | 30 |
尺寸图
数据手册
软件开发
Arduino
UiFlow1
UiFlow2
通信协议
Easyloader
| Easyloader | 下载链接 | 备注 |
|---|---|---|
| Module COMX Zigbee P2P Chat Room Example Easyloader with M5Core | download | / |
| Module COMX Zigbee Coordinator Example Easyloader with M5Core | download | / |
| Module COMX Zigbee End Device Example Easyloader with M5Core | download | / |
相关视频
Page Tools