
Unit Joystick
SKU:U024






描述
Unit Joystick 是一款摇杆控制输入单元,采用 I2C 通信接口,支持三轴控制信号输入 (X / Y 轴偏移模拟量输入,Z 轴按键数字量输入)。适用于游戏 / 机器人控制等应用场景。
产品特性
- 三轴输入:
- X/Y 轴偏移模拟量输入
- Z 轴按键数字量输入
- 2 x LEGO 兼容孔
- 开发平台: Arduino,UiFlow (Blockly,Python)
包装内容
- 1 x Unit Joystick
- 1 x HY2.0-4P Grove 连接线 (20cm)
应用场景
- 游戏控制器
- 机器人远程控制
规格参数
| 规格 | 参数 |
|---|---|
| 通讯协议 | I2C:0x52 |
| X、Y 轴偏移输出值 | 0-255 |
| Z 轴按键输出值 | 0/1 |
| 产品重量 | 11g |
| 毛重 | 27g |
| 产品尺寸 | 48 x 24 x 32mm |
| 包装尺寸 | 75 x 45 x 30mm |
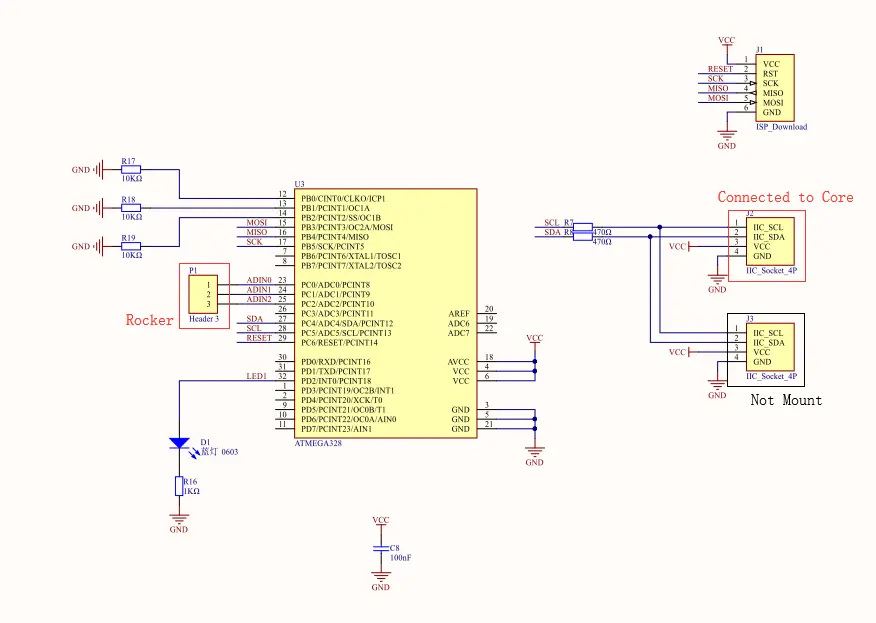
原理图
管脚映射
Unit Joystick
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.A | GND | 5V | SDA | SCL |
软件开发
Arduino

UiFlow1
UiFlow2
通讯协议
- 协议类型 I2C
- I2C Address: 0x52
JOYSTICK REG 0x52
| REG | len | description | return values |
|---|---|---|---|
| 0x52 | 3 | 读取摇杆状态 | [0] X VALUE [1] Y VALUE [2] BTN STATUS |
EasyLoader
| Easyloader | 下载链接 | 备注 |
|---|---|---|
| Unit Joystick Easyloader | download | / |
相关视频
- 显示摇杆 XY 数据及按钮状态.
Page Tools