
Unit Grove to Grove
SKU:U148









描述
Unit Grove to Grove 是一款提供 通断控制 + 电流测量 的 一进一出 GROVE 扩展控制单元。通断控制采用开关量信号,电流测量为 0 ~ 1000mA 模拟信号。
产品特性
- 通断控制: 5V/1A
- 电流测量: 0~1000mA
包装内容
- 1 x Unit Grove to Grove
- 1 x HY2.0-4P Grove 连接线 (20cm)
规格参数
| 规格 | 参数 |
|---|---|
| 工作电压 | 5V |
| 通断电流 | 1000mA |
| 通断回路电压 | 5V |
| 电流测量阈值 | 0~1000mA |
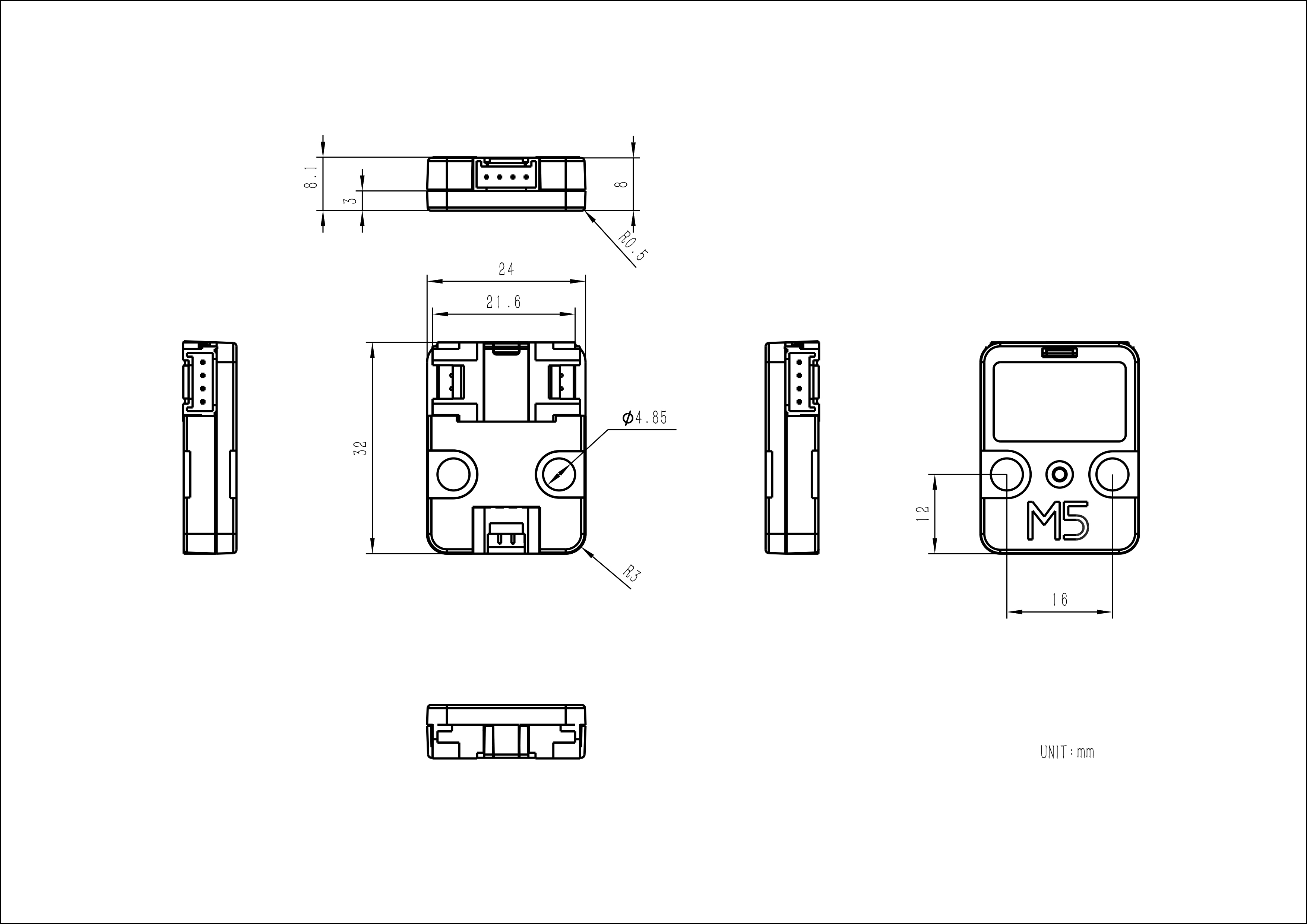
| 产品尺寸 | 32.0 x 24.0 x 8.1mm |
| 产品重量 | 4.9g |
| 包装尺寸 | 138.0 x 93.0 x 9.1mm |
| 毛重 | 10.0g |
原理图
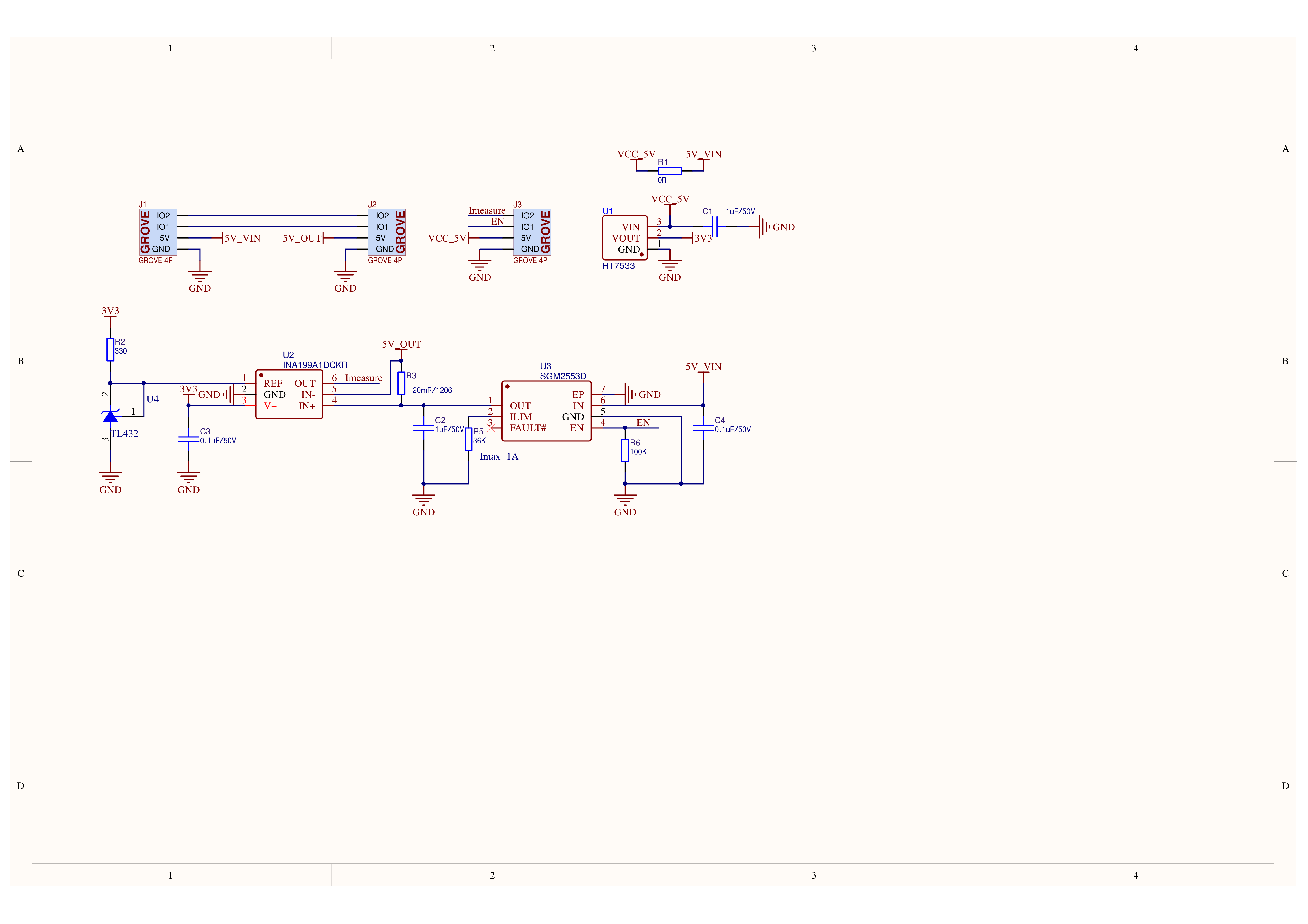
1/1
管脚映射
Unit Grove to Grove
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.B | GND | 5V | PWR_EN | Analog Output |
尺寸图
结构文件
软件开发
Arduino
#include <Arduino.h>
#include "driver/adc.h"
#include "esp_adc_cal.h"
#include "math.h"
#include <M5GFX.h>
#define Din_Pin 26
#define Aout_Pin 36
#define groveOn HIGH
#define groveOff LOW
esp_adc_cal_characteristics_t *adc_chars;
float groveVref;
M5GFX display;
M5Canvas canvas(&display);
int get_battery_voltage(void) {
uint32_t adc_reading = 0;
// Multisampling
for (int i = 0; i < 64; i++) {
adc_reading += adc1_get_raw((adc1_channel_t)ADC1_CHANNEL_0);
}
adc_reading /= 64;
// Convert adc_reading to voltage in mV
uint32_t voltage =
(uint32_t)(esp_adc_cal_raw_to_voltage(adc_reading, adc_chars));
// Serial.printf("Raw: %dtVoltage: %dmVrn", adc_reading, voltage);
return voltage;
}
void getVerf() {
float sampleVari = 1.0f;
while (sampleVari > 0.20f) {
sampleVari = 1.0f;
float sampleVol[100] = {};
float sampleVolAll = 0;
groveVref = 0;
for (int i = 0; i < 100; i++) {
sampleVol[i] = get_battery_voltage();
groveVref = groveVref + get_battery_voltage();
// Serial.println(sampleVol[i]);
}
// Serial.println(groveVref);
for (int i = 0; i < 100; i++) {
// Serial.println(sampleVol[i]);
float avrAll = sampleVol[i] - (groveVref / 100.0f);
// Serial.println(avrAll);
sampleVolAll += avrAll * avrAll;
}
// Serial.println(sampleVolAll);
sampleVari = sampleVolAll / 99.0f;
Serial.println(sampleVari);
Serial.println(groveVref);
}
// return groveVref;
}
void setup() {
Serial.begin(115200);
pinMode(Din_Pin, OUTPUT);
digitalWrite(Din_Pin, groveOn);
display.begin();
if (display.width() < display.height())
{
display.setRotation(display.getRotation() ^ 1);
}
// ADC初始化
gpio_pad_select_gpio(Aout_Pin);
gpio_set_direction((gpio_num_t)Aout_Pin, GPIO_MODE_INPUT);
adc1_config_width(ADC_WIDTH_BIT_12);
adc1_config_channel_atten(ADC1_CHANNEL_0, ADC_ATTEN_DB_11);
adc_chars = (esp_adc_cal_characteristics_t *)calloc(
1, sizeof(esp_adc_cal_characteristics_t));
esp_adc_cal_characterize(ADC_UNIT_1, ADC_ATTEN_DB_11, ADC_WIDTH_BIT_12,
3300, adc_chars);
// groveVref = get_battery_voltage();
// for (size_t i = 0; i < 5; i++) {
// groveVref = groveVref + get_battery_voltage();
// Serial.println(groveVref);
// }
// groveVref = groveVref / 5.0f / 1000.0f;
getVerf();
// Serial.println(groveVref);
groveVref = groveVref / 100.0f / 1000.0f;
// Serial.println(groveVref);
canvas.setColorDepth(1); // mono color
canvas.createSprite(display.width(), display.height());
canvas.setTextSize((float)canvas.width() / 160);
canvas.setTextScroll(true);
}
void loop() {
// Serial.printf("Raw is %dn", analogRead(Aout_Pin));
float groveVol = get_battery_voltage() / 1000.0f;
// Serial.println(groveVol);
Serial.printf("Voltage is: %fVrn", groveVol);
canvas.printf("Voltage is: %fVrn", groveVol);
// float groveCurrent = ((groveVol - groveVref) / 50.0f / 0.01f);
// float groveCurrent = ((groveVol - groveVref) / 83.0f / 0.01f);
float groveCurrent = ((groveVol - groveVref) / 50.0f / 0.02f);
Serial.printf("Current is: %fArn", groveCurrent);
canvas.printf("Current is: %fArn", groveCurrent);
//digitalWrite(Din_Pin, groveOff);
canvas.pushSprite(0, 0);
delay(1000);
}UiFlow1
UiFlow2
相关视频
Page Tools