
























Product Guide
IoT Cloud
AWS IoT Core
IoT Tools
VAMeter
LoRa & LoRaWAN
Network
Ai Camera
Wi-Fi Camera
Ethernet Camera
PoECAM
Linux
Motor Control
Easyloader
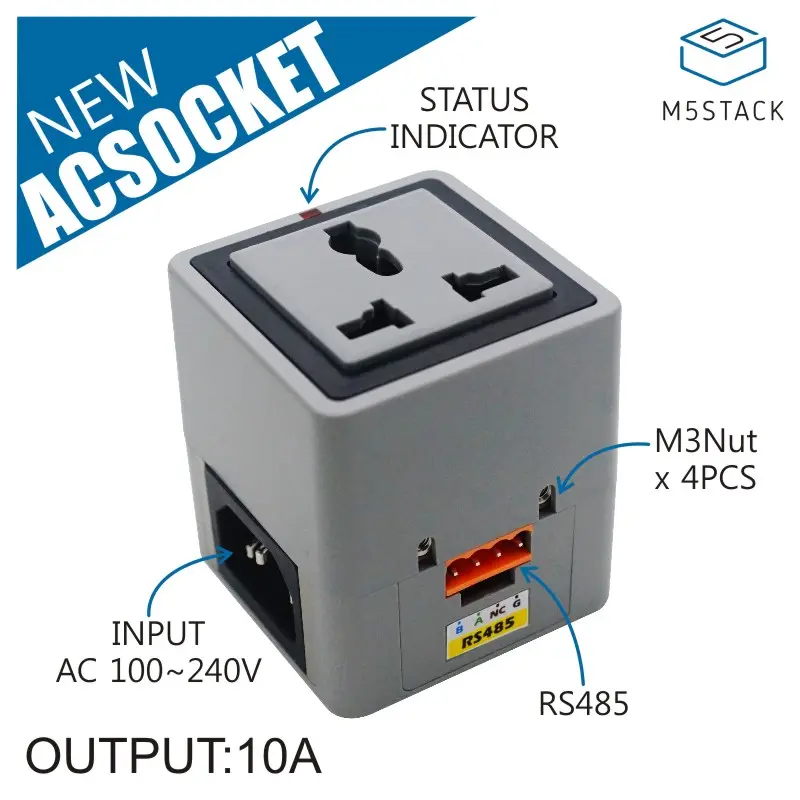
RS485
<img src="
https://static-cdn.m5stack.com/resource/docs/static/assets/img/product_pics/unit/unit_rs485_01.webp"
width="20%" height="20%"

{kind=link}
RS485の使用紹介
RS485は長距離データ伝送の標準で、基本的な使い方はシリアル通信と同じで、RXとTXのポート、通信のボーレート、データビットを定義して通信を行います。通常は(9600, Serial_8N1, RX_PIN, TX_PIN)の設定を用います。つまり、9600のボーレート、8のデータビット、パリティビットがない、1のストップビットです。
RS485のArduino使用例
- プログラムの初期化時、シリアル2を定義します。通常、M5Stackのシリアルは16(RX_PIN)と17(TX_PIN)、M5StickCのシリアルは33(RX_PIN)と32(TX_PIN)、HATのシリアルは26(RX_PIN)と0(TX_PIN)です。
Serial2.begin(115200, SERIAL_8N1, RX_PIN, TX_PIN);
- データの送信はSerial2.print("x")やSerial2.write("x")を使えます。両者の違いはArduinoのSerialの使用説明を参照してください。
Serial2.print("97");または Serial2.write("97");
- データの読み取りはSerial2.read()を使ってバッファから読み出せます。
if(Serial2.available()){ char c = Serial2.read(); }
*以下の基本コードは参考用です。
#include <M5Stack.h>
#define RX_PIN 16
#define TX_PIN 17
void setup() {
M5.begin();
Serial2.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); //串口2初始化
}
void loop() {
if(M5.BtnA.wasPressed()){ //如果按键A被按下
Serial2.print("hello,from RS485\r\n"); //通过串口2发送数据
}
if(Serial2.available()){ //如果串口有数据读取并打印
char c = Serial2.read();
Serial.print(c);
}
M5.update(); //按键状态刷新
}
UIFlowでRS485を使う例
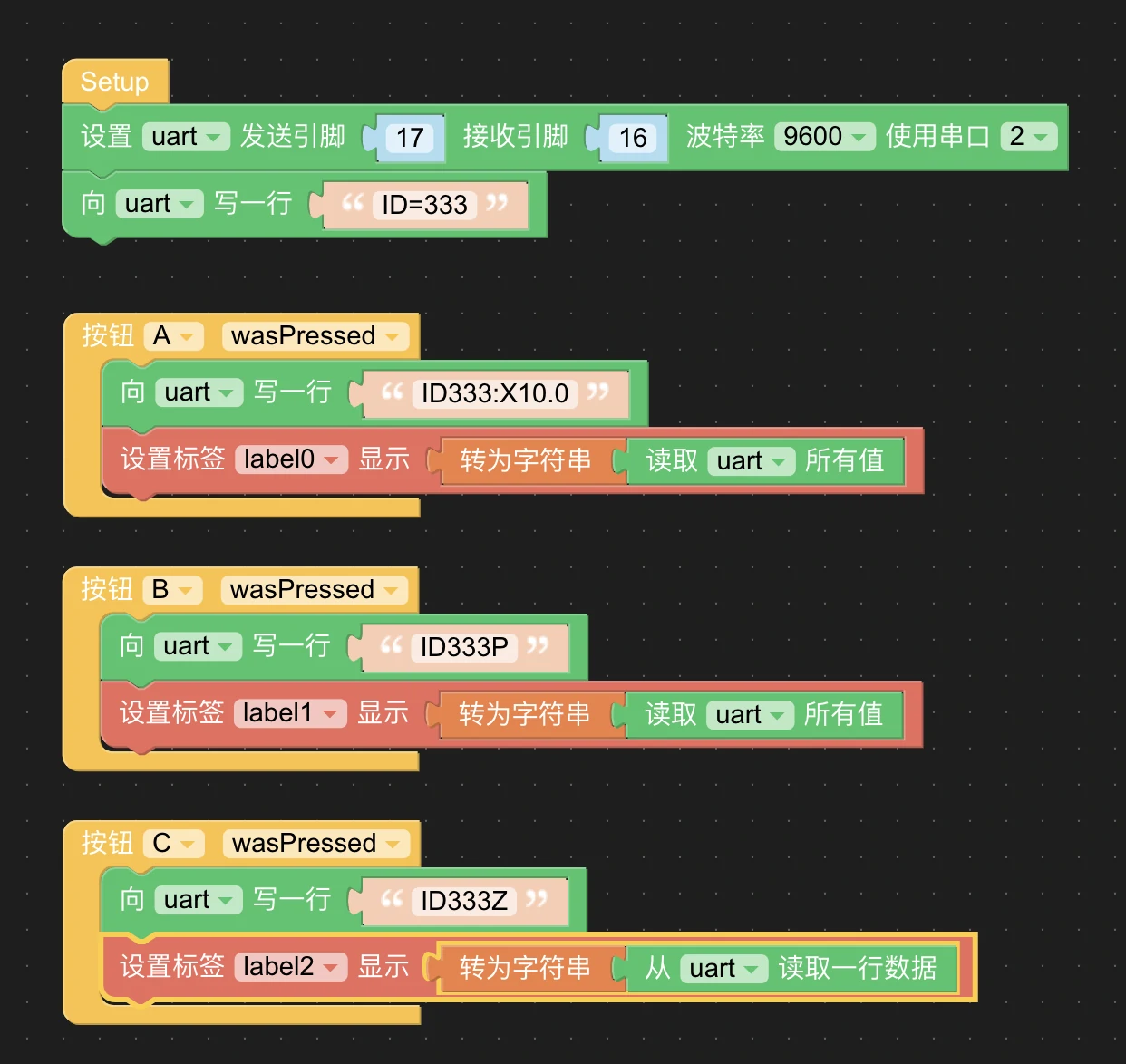
PUSH6060の例程
RS485の例を参考にしてください。以下はサンプルコードです。
#include <M5Stack.h>
#define RX_PIN 16
#define TX_PIN 17
#define X_LOCAL 40
#define Y_LOCAL 40
#define X_OFF 160
#define Y_OFF 30
int distance = 0; //步进电机移动步进值
void header(const char *string, uint16_t color){ //标题
M5.Lcd.fillScreen(color);
M5.Lcd.setTextSize(1);
M5.Lcd.setTextColor(TFT_MAGENTA, TFT_BLUE);
M5.Lcd.fillRect(0, 0, 320, 30, TFT_BLUE);
M5.Lcd.setTextDatum(TC_DATUM);
M5.Lcd.drawString(string, 160, 3, 4);
}
void setup() {
M5.begin();
M5.Power.begin();
header("PUSH 6060", TFT_BLACK);
M5.Lcd.setTextFont(2);
M5.Lcd.setTextColor(TFT_WHITE, TFT_BLACK);
Serial2.begin(9600, SERIAL_8N1, RX_PIN, TX_PIN); //配置串口2
delay(500);
Serial2.print("ID=123\r\n"); //串口2输出ID=123\r\n,配置6060电机ID为123
}
void loop() {
if(M5.BtnA.wasPressed()){ //按键A按下发送ID\r\n,查看6060电机ID
Serial2.print("ID\r\n");
}
if(M5.BtnB.wasPressed()){ //按键B按下发送ID123:X%d\r\n控制移动绝对行程,其中%d为变量distance
if(distance < 50){
distance +=10;
Serial2.printf("ID123:X%d\r\n",distance);
}
}
if(M5.BtnC.wasPressed()){ //按键C按下发送ID123Z\r\n,电机回原点
Serial2.print("ID123Z\r\n");
}
if(Serial2.available()){ //串口2接收6060返回的消息并打印
char c = Serial2.read();
Serial.print(c);
}
M5.update();
}