


StackFlow AI Platform
Devices & Quick Start
Models
Qwen3
DeepSeek-R1
AI Pyramid Applications
Module LLM Applications
CV Vision Application
Vision Language Model (VLM)
Large Language Model (LLM)
Voice Assistant
Module LLM - Yolo11n
This example demonstrates how to use the M5ModuleLLM library on the Arduino platform to invoke the yolo11n model for performing YOLO object detection tasks.
Preparation
Refer to Module LLM Arduino Quick Start to complete the basic setup and install the M5ModuleLLM driver library.
Refer to Module LLM Software Package Update Guide to install the following model package.
apt install llm-yolo- The hardware used in this example includes:
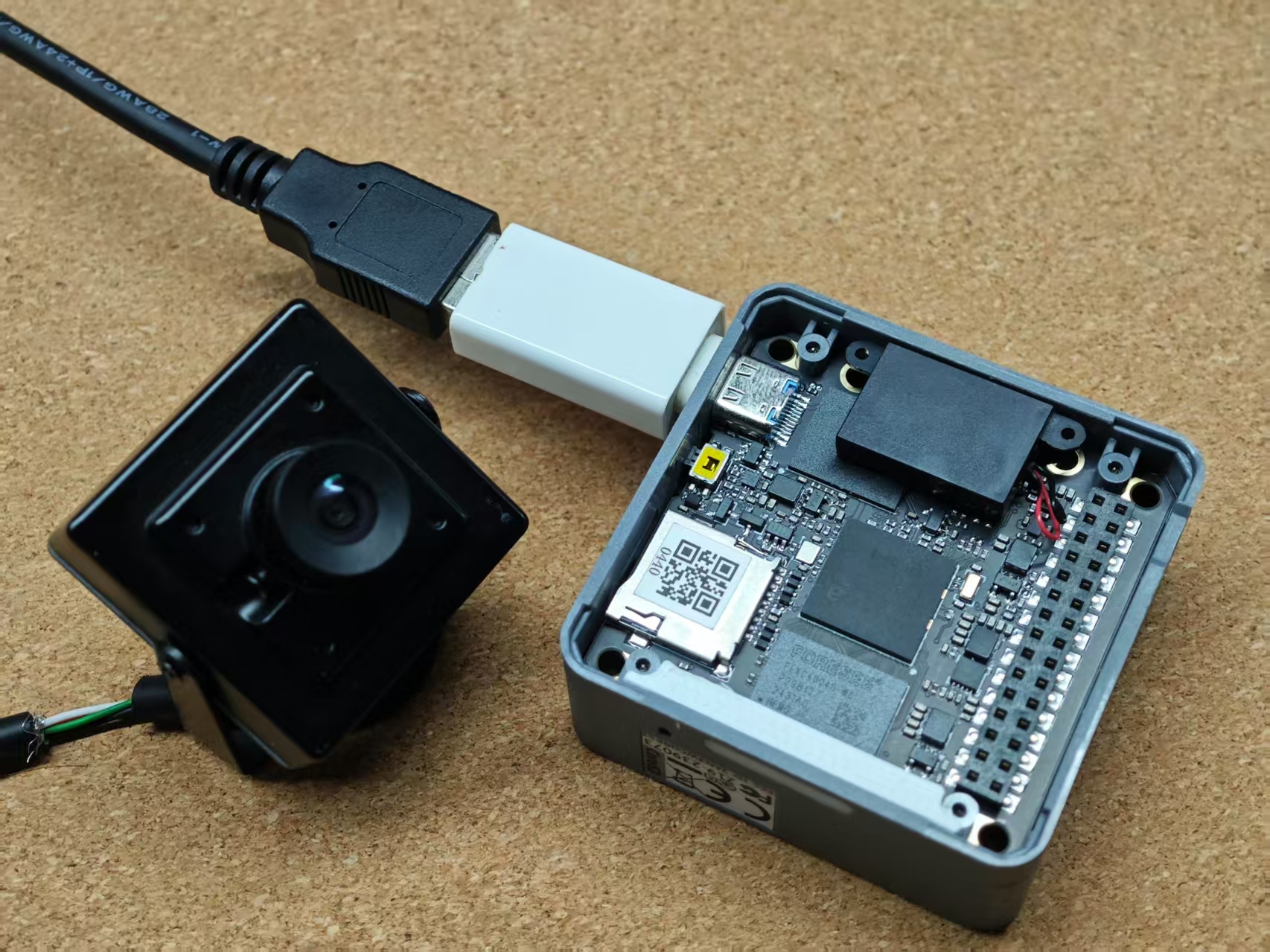
- Module LLM Kit
- CoreS3
- USB Camera
Yolo11n CoreS3
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#include <Arduino.h>
#include <M5Unified.h>
#include <M5ModuleLLM.h>
#include <M5GFX.h>
#include "M5CoreS3.h"
M5ModuleLLM module_llm;
String yolo_work_id;
struct DetectionResult {
String class_name;
float confidence;
int x1;
int y1;
int x2;
int y2;
};
M5Canvas canvas(&M5.Display);
void setup()
{
M5.begin();
M5.Display.setTextSize(2);
M5.Display.setTextScroll(true);
canvas.createSprite(M5.Display.width(), M5.Display.height());
/* Init M5CoreS3 Camera */
CoreS3.Camera.begin();
CoreS3.Camera.sensor->set_framesize(CoreS3.Camera.sensor, FRAMESIZE_QVGA);
/* Init module serial port */
int rxd = M5.getPin(m5::pin_name_t::port_c_rxd);
int txd = M5.getPin(m5::pin_name_t::port_c_txd);
Serial2.begin(115200, SERIAL_8N1, rxd, txd);
/* Init module */
module_llm.begin(&Serial2);
/* Make sure module is connected */
M5.Display.printf(">> Check ModuleLLM connection..\n");
while (1) {
if (module_llm.checkConnection()) {
break;
}
}
/* Reset ModuleLLM */
M5.Display.printf(">> Reset ModuleLLM..\n");
module_llm.sys.reset();
/* Set ModuleLLM baud rate */
M5.Display.printf(">> ModuleLLM connected, set baud rate to 1500000\n");
module_llm.setBaudRate(1500000);
Serial2.begin(1500000, SERIAL_8N1, rxd, txd);
module_llm.begin(&Serial2);
/* Setup YOLO module and save returned work id */
M5.Display.printf(">> Setup yolo..\n");
yolo_work_id = module_llm.yolo.setup();
canvas.setFont(&fonts::FreeSerifBold12pt7b);
}
DetectionResult parseDetection(String& jsonStr)
{
DetectionResult detection;
JsonDocument doc;
deserializeJson(doc, jsonStr);
JsonObject obj = doc.as<JsonObject>();
if (obj["bbox"].is<JsonArray>() && obj["class"].is<const char*>() && obj["confidence"].is<const char*>()) {
detection.class_name = obj["class"].as<const char*>();
detection.confidence = atof(obj["confidence"].as<const char*>());
JsonArray bbox = obj["bbox"].as<JsonArray>();
if (bbox.size() == 4) {
detection.x1 = (int)atof(bbox[0].as<const char*>());
detection.y1 = (int)atof(bbox[1].as<const char*>());
detection.x2 = (int)atof(bbox[2].as<const char*>());
detection.y2 = (int)atof(bbox[3].as<const char*>());
}
}
return detection;
}
void loop()
{
if (CoreS3.Camera.get()) {
uint8_t* out_jpg = NULL;
size_t out_jpg_len = 0;
frame2jpg(CoreS3.Camera.fb, 50, &out_jpg, &out_jpg_len);
canvas.pushImage(0, 0, CoreS3.Display.width(), CoreS3.Display.height(), (uint16_t*)CoreS3.Camera.fb->buf);
module_llm.yolo.inferenceAndWaitResult(
yolo_work_id, out_jpg, out_jpg_len,
[](String& result) {
DetectionResult detection = parseDetection(result);
int y1_pos = detection.y1 - 40;
if (y1_pos < 24) y1_pos = 24;
String combinedResult = detection.class_name + " " + String(detection.confidence, 2);
canvas.drawString(combinedResult, detection.x1, y1_pos);
canvas.drawRect(detection.x1, detection.y1 - 40, detection.x2, detection.y2 - 40, ORANGE);
},
10);
canvas.pushSprite(0, 0);
free(out_jpg);
}
CoreS3.Camera.free();
}- Upload the code to CoreS3.
- Wait for initialization to complete and enter detection mode. The detection results will be displayed on the screen.

Note
This demo changes the baud rate of the Module LLM's serial communication. After CoreS3 restarts, you need to power cycle the Module LLM.
Yolo11n USB Camera
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#include <Arduino.h>
#include <M5Unified.h>
#include <M5ModuleLLM.h>
M5ModuleLLM module_llm;
String camera_work_id;
String yolo_work_id;
void clearDisplay()
{
M5.Display.fillRect(40, 50, 270, 20, BLACK);
M5.Display.fillRect(150, 80, 60, 20, BLACK);
M5.Display.fillRect(40, 110, 40, 20, BLACK);
M5.Display.fillRect(40, 140, 40, 20, BLACK);
M5.Display.fillRect(40, 170, 40, 20, BLACK);
M5.Display.fillRect(40, 200, 40, 20, BLACK);
}
void setup()
{
M5.begin();
M5.Display.setTextSize(2);
M5.Display.setTextScroll(true);
/* Init module serial port */
int rxd = M5.getPin(m5::pin_name_t::port_c_rxd);
int txd = M5.getPin(m5::pin_name_t::port_c_txd);
Serial2.begin(115200, SERIAL_8N1, rxd, txd);
/* Init module */
module_llm.begin(&Serial2);
/* Make sure module is connected */
M5.Display.setTextColor(ORANGE, BLACK);
M5.Display.setTextSize(2);
M5.Display.setTextDatum(middle_center);
M5.Display.drawString("Check ModuleLLM connection..", M5.Display.width() / 2, M5.Display.height() / 2);
while (1) {
if (module_llm.checkConnection()) {
break;
}
}
/* Reset ModuleLLM */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Reset ModuleLLM..", M5.Display.width() / 2, M5.Display.height() / 2);
module_llm.sys.reset();
/* Setup Camera module */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Setup camera..", M5.Display.width() / 2, M5.Display.height() / 2);
camera_work_id = module_llm.camera.setup();
/* Setup YOLO module and save returned work id */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Setup yolo..", M5.Display.width() / 2, M5.Display.height() / 2);
m5_module_llm::ApiYoloSetupConfig_t yolo_config;
yolo_config.input = {camera_work_id};
yolo_work_id = module_llm.yolo.setup(yolo_config, "yolo_setup");
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.setTextDatum(top_left);
M5.Display.drawString("class", 10, 20);
M5.Display.drawString("confidence", 10, 80);
M5.Display.drawString("x1", 10, 110);
M5.Display.drawString("y1", 10, 140);
M5.Display.drawString("x2", 10, 170);
M5.Display.drawString("y2", 10, 200);
}
void loop()
{
/* Update ModuleLLM */
module_llm.update();
/* Handle module response messages */
for (auto& msg : module_llm.msg.responseMsgList) {
/* If YOLO module message */
if (msg.work_id == yolo_work_id) {
/* Check message object type */
if (msg.object == "yolo.box.stream") {
/* Parse message json and get YOLO result */
JsonDocument doc;
deserializeJson(doc, msg.raw_msg);
JsonObject delta = doc["data"]["delta"].as<JsonObject>();
if (delta.containsKey("bbox") && delta.containsKey("class") && delta.containsKey("confidence")) {
String class_name = delta["class"].as<String>();
float confidence = delta["confidence"].as<float>();
JsonArray bboxArray = delta["bbox"].as<JsonArray>();
if (bboxArray.size() == 4) {
int x1 = bboxArray[0].as<int>();
int y1 = bboxArray[1].as<int>();
int x2 = bboxArray[2].as<int>();
int y2 = bboxArray[3].as<int>();
clearDisplay();
M5.Display.drawString(class_name, 40, 50);
M5.Display.drawFloat(confidence, 2, 150, 80);
M5.Display.drawNumber(x1, 40, 110);
M5.Display.drawNumber(y1, 40, 140);
M5.Display.drawNumber(x2, 40, 170);
M5.Display.drawNumber(y2, 40, 200);
}
} else {
clearDisplay();
}
}
}
}
/* Clear handled messages */
module_llm.msg.clearMsg("yolo_setup");
module_llm.msg.responseMsgList.clear();
}- Connect the USB camera to the Module LLM. Since the Module LLM does not have a USB-A port, a USB-A to USB-C adapter is required.
- Upload the code to CoreS3.
- Wait for initialization to complete, and enter detection mode. The detection results will be displayed on the screen in text format.
