


StackFlow AI Platform
设备开发 & 快速上手
模型介绍
Qwen3
DeepSeek-R1
AI Pyramid 应用案例
Module LLM 应用案例
CV 视觉应用
VLM 多模态
LLM 大语言模型
语音助手
Module LLM - Yolo11n
该示例演示了如何在 Arduino 平台上利用 M5ModuleLLM 库调用 yolo11n 模型,以执行 YOLO 目标检测任务。
准备工作
参考Module LLM Arduino 快速上手,完成基础环境搭建与 M5ModuleLLM 驱动库的安装。
参考Module LLM 软件包更新教程,完成以下模型包的安装。
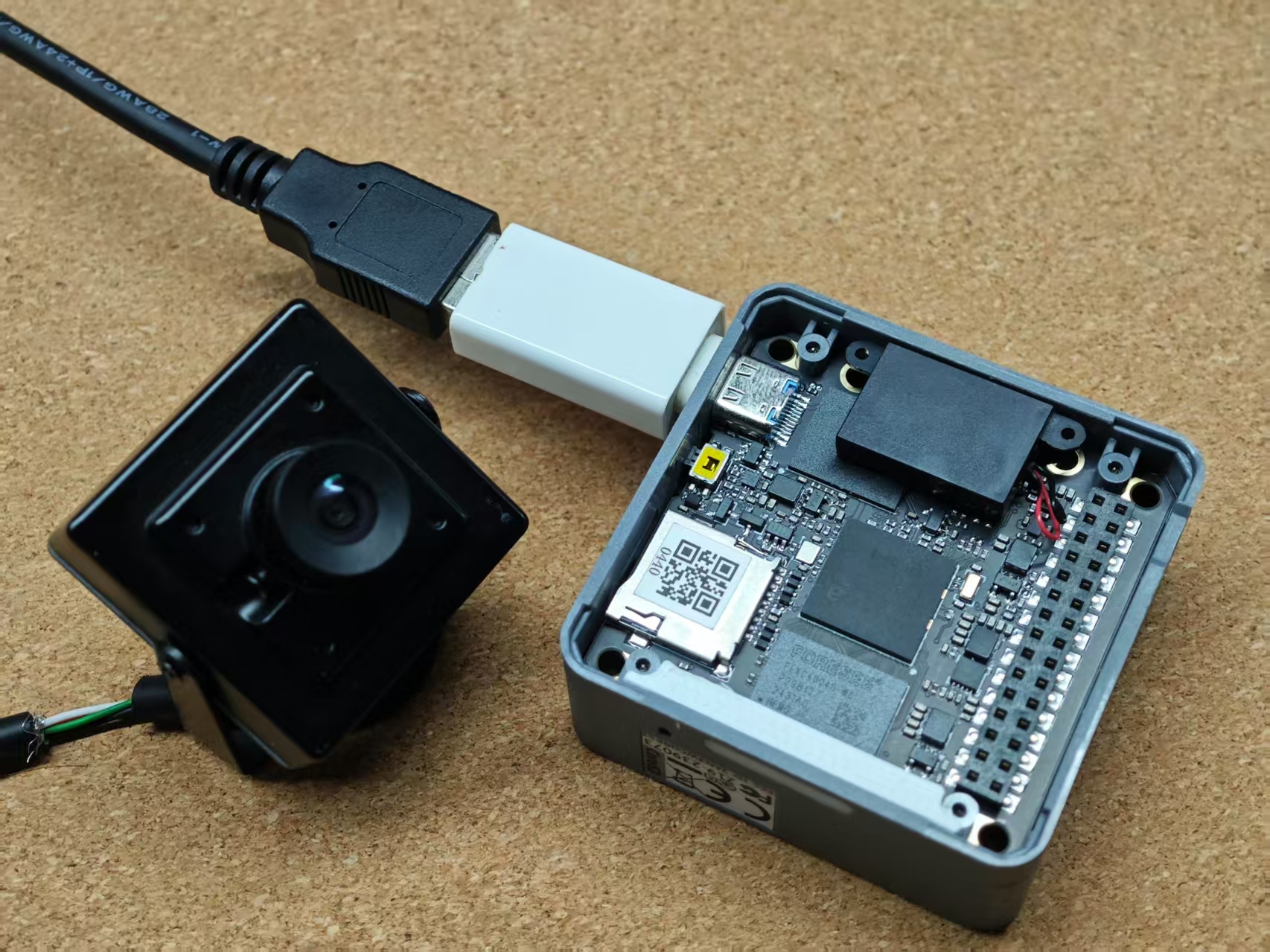
apt install llm-yolo- 以下示例使用到的硬件设备包含:
- Module LLM Kit
- CoreS3
- USB 摄像头
Yolo11n CoreS3
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#include <Arduino.h>
#include <M5Unified.h>
#include <M5ModuleLLM.h>
#include <M5GFX.h>
#include "M5CoreS3.h"
M5ModuleLLM module_llm;
String yolo_work_id;
struct DetectionResult {
String class_name;
float confidence;
int x1;
int y1;
int x2;
int y2;
};
M5Canvas canvas(&M5.Display);
void setup()
{
M5.begin();
M5.Display.setTextSize(2);
M5.Display.setTextScroll(true);
canvas.createSprite(M5.Display.width(), M5.Display.height());
/* Init M5CoreS3 Camera */
CoreS3.Camera.begin();
CoreS3.Camera.sensor->set_framesize(CoreS3.Camera.sensor, FRAMESIZE_QVGA);
/* Init module serial port */
int rxd = M5.getPin(m5::pin_name_t::port_c_rxd);
int txd = M5.getPin(m5::pin_name_t::port_c_txd);
Serial2.begin(115200, SERIAL_8N1, rxd, txd);
/* Init module */
module_llm.begin(&Serial2);
/* Make sure module is connected */
M5.Display.printf(">> Check ModuleLLM connection..\n");
while (1) {
if (module_llm.checkConnection()) {
break;
}
}
/* Reset ModuleLLM */
M5.Display.printf(">> Reset ModuleLLM..\n");
module_llm.sys.reset();
/* Set ModuleLLM baud rate */
M5.Display.printf(">> ModuleLLM connected, set baud rate to 1500000\n");
module_llm.setBaudRate(1500000);
Serial2.begin(1500000, SERIAL_8N1, rxd, txd);
module_llm.begin(&Serial2);
/* Setup YOLO module and save returned work id */
M5.Display.printf(">> Setup yolo..\n");
yolo_work_id = module_llm.yolo.setup();
canvas.setFont(&fonts::FreeSerifBold12pt7b);
}
DetectionResult parseDetection(String& jsonStr)
{
DetectionResult detection;
JsonDocument doc;
deserializeJson(doc, jsonStr);
JsonObject obj = doc.as<JsonObject>();
if (obj["bbox"].is<JsonArray>() && obj["class"].is<const char*>() && obj["confidence"].is<const char*>()) {
detection.class_name = obj["class"].as<const char*>();
detection.confidence = atof(obj["confidence"].as<const char*>());
JsonArray bbox = obj["bbox"].as<JsonArray>();
if (bbox.size() == 4) {
detection.x1 = (int)atof(bbox[0].as<const char*>());
detection.y1 = (int)atof(bbox[1].as<const char*>());
detection.x2 = (int)atof(bbox[2].as<const char*>());
detection.y2 = (int)atof(bbox[3].as<const char*>());
}
}
return detection;
}
void loop()
{
if (CoreS3.Camera.get()) {
uint8_t* out_jpg = NULL;
size_t out_jpg_len = 0;
frame2jpg(CoreS3.Camera.fb, 50, &out_jpg, &out_jpg_len);
canvas.pushImage(0, 0, CoreS3.Display.width(), CoreS3.Display.height(), (uint16_t*)CoreS3.Camera.fb->buf);
module_llm.yolo.inferenceAndWaitResult(
yolo_work_id, out_jpg, out_jpg_len,
[](String& result) {
DetectionResult detection = parseDetection(result);
int y1_pos = detection.y1 - 40;
if (y1_pos < 24) y1_pos = 24;
String combinedResult = detection.class_name + " " + String(detection.confidence, 2);
canvas.drawString(combinedResult, detection.x1, y1_pos);
canvas.drawRect(detection.x1, detection.y1 - 40, detection.x2, detection.y2 - 40, ORANGE);
},
10);
canvas.pushSprite(0, 0);
free(out_jpg);
}
CoreS3.Camera.free();
}- 将代码上传到 CoreS3。
- 等待初始化完成,进入检测模式,屏幕显示检测结果。

注意事项
此 demo 会改变 Module LLM 串口通信的波特率。当 CoreS3 重启后,需要断电重启 Module LLM。
Yolo11n USB 摄像头
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#include <Arduino.h>
#include <M5Unified.h>
#include <M5ModuleLLM.h>
M5ModuleLLM module_llm;
String camera_work_id;
String yolo_work_id;
void clearDisplay()
{
M5.Display.fillRect(40, 50, 270, 20, BLACK);
M5.Display.fillRect(150, 80, 60, 20, BLACK);
M5.Display.fillRect(40, 110, 40, 20, BLACK);
M5.Display.fillRect(40, 140, 40, 20, BLACK);
M5.Display.fillRect(40, 170, 40, 20, BLACK);
M5.Display.fillRect(40, 200, 40, 20, BLACK);
}
void setup()
{
M5.begin();
M5.Display.setTextSize(2);
M5.Display.setTextScroll(true);
/* Init module serial port */
int rxd = M5.getPin(m5::pin_name_t::port_c_rxd);
int txd = M5.getPin(m5::pin_name_t::port_c_txd);
Serial2.begin(115200, SERIAL_8N1, rxd, txd);
/* Init module */
module_llm.begin(&Serial2);
/* Make sure module is connected */
M5.Display.setTextColor(ORANGE, BLACK);
M5.Display.setTextSize(2);
M5.Display.setTextDatum(middle_center);
M5.Display.drawString("Check ModuleLLM connection..", M5.Display.width() / 2, M5.Display.height() / 2);
while (1) {
if (module_llm.checkConnection()) {
break;
}
}
/* Reset ModuleLLM */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Reset ModuleLLM..", M5.Display.width() / 2, M5.Display.height() / 2);
module_llm.sys.reset();
/* Setup Camera module */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Setup camera..", M5.Display.width() / 2, M5.Display.height() / 2);
camera_work_id = module_llm.camera.setup();
/* Setup YOLO module and save returned work id */
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.drawString("Setup yolo..", M5.Display.width() / 2, M5.Display.height() / 2);
m5_module_llm::ApiYoloSetupConfig_t yolo_config;
yolo_config.input = {camera_work_id};
yolo_work_id = module_llm.yolo.setup(yolo_config, "yolo_setup");
M5.Display.fillRect(0, (M5.Display.height() / 2) - 10, 320, 25, BLACK);
M5.Display.setTextDatum(top_left);
M5.Display.drawString("class", 10, 20);
M5.Display.drawString("confidence", 10, 80);
M5.Display.drawString("x1", 10, 110);
M5.Display.drawString("y1", 10, 140);
M5.Display.drawString("x2", 10, 170);
M5.Display.drawString("y2", 10, 200);
}
void loop()
{
/* Update ModuleLLM */
module_llm.update();
/* Handle module response messages */
for (auto& msg : module_llm.msg.responseMsgList) {
/* If YOLO module message */
if (msg.work_id == yolo_work_id) {
/* Check message object type */
if (msg.object == "yolo.box.stream") {
/* Parse message json and get YOLO result */
JsonDocument doc;
deserializeJson(doc, msg.raw_msg);
JsonObject delta = doc["data"]["delta"].as<JsonObject>();
if (delta.containsKey("bbox") && delta.containsKey("class") && delta.containsKey("confidence")) {
String class_name = delta["class"].as<String>();
float confidence = delta["confidence"].as<float>();
JsonArray bboxArray = delta["bbox"].as<JsonArray>();
if (bboxArray.size() == 4) {
int x1 = bboxArray[0].as<int>();
int y1 = bboxArray[1].as<int>();
int x2 = bboxArray[2].as<int>();
int y2 = bboxArray[3].as<int>();
clearDisplay();
M5.Display.drawString(class_name, 40, 50);
M5.Display.drawFloat(confidence, 2, 150, 80);
M5.Display.drawNumber(x1, 40, 110);
M5.Display.drawNumber(y1, 40, 140);
M5.Display.drawNumber(x2, 40, 170);
M5.Display.drawNumber(y2, 40, 200);
}
} else {
clearDisplay();
}
}
}
}
/* Clear handled messages */
module_llm.msg.clearMsg("yolo_setup");
module_llm.msg.responseMsgList.clear();
}- 将 USB 摄像头到 Module LLM,由于 Module LLM 并没有 USB-A 接口,连接的时候需要使用到一个 USB-A to USB-C 转接器。
- 将代码上传到 CoreS3。
- 等待初始化完成,进入检测模式,屏幕以文本显示检测结果。
