Product Guide
Linux PC
AI Accelerator Card
LLM-8850 Card
Large Language Models
LLM
Real-Time AI Voice Assistant
XiaoZhi Voice Assistant
AtomS3R-M12 Volcengine Kit
Offline Voice Recognition
Industrial Control
IoT Measuring Instruments
Air Quality
PowerHub
Module13.2 PPS
VAMeter
T-Lite
Ethernet Camera
PoECAM
Wi-Fi Camera
Unit CamS3/-5MP
AI Camera
LoRa & LoRaWAN
Motor Control
Restore Factory Firmware
DIP Switch Usage Guide
M5Bala Quick Start Guide
To use the M5Bala, you need the M5Stack FIRE or M5GO (White).

Development Environment
UIFlow Editing
- Press the red button on the side of the M5Core to power on (quick double press to power off).
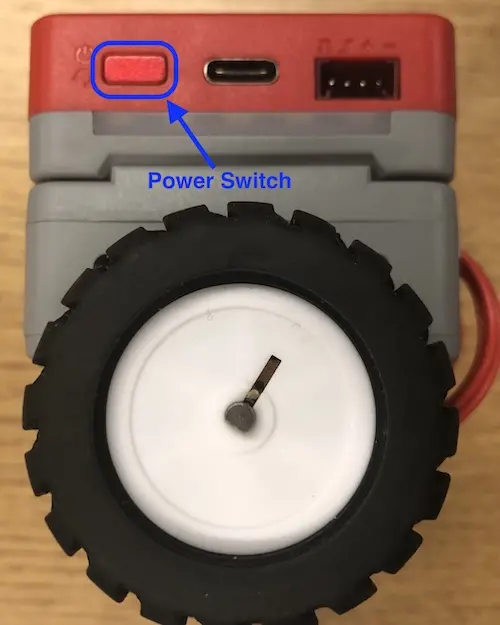
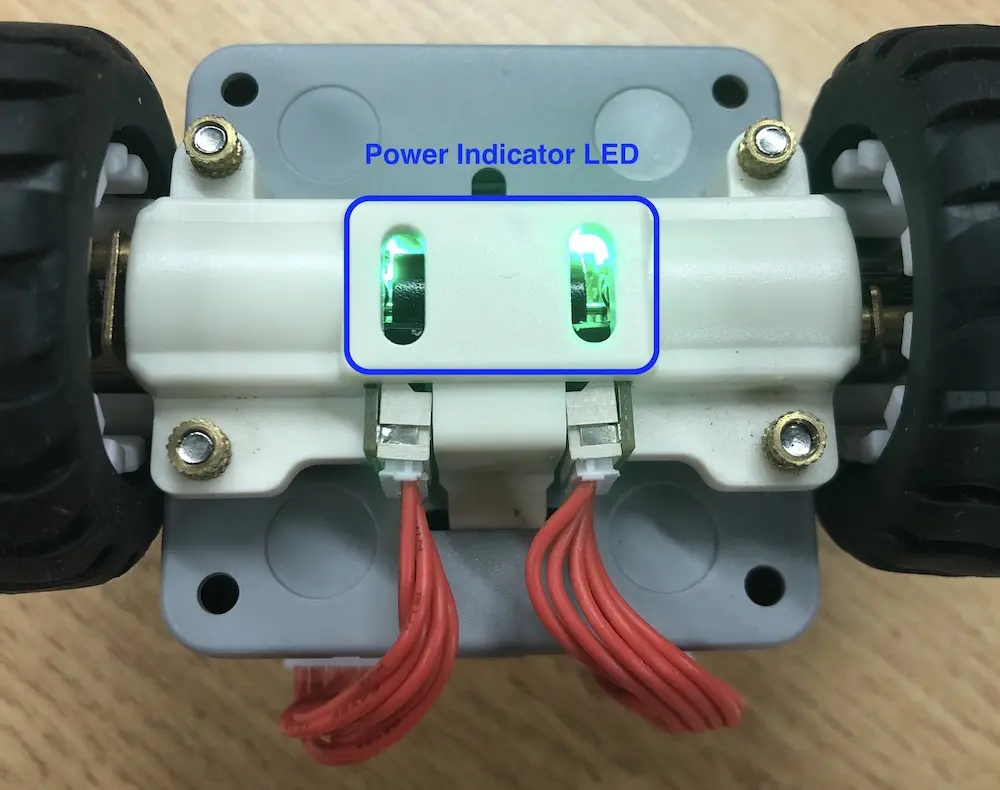
- Press the button on the base of M5Bala to start the power (press twice in succession to turn off the power).
- Visit UIFlow, switch the programming mode from
BlocklytoPython.
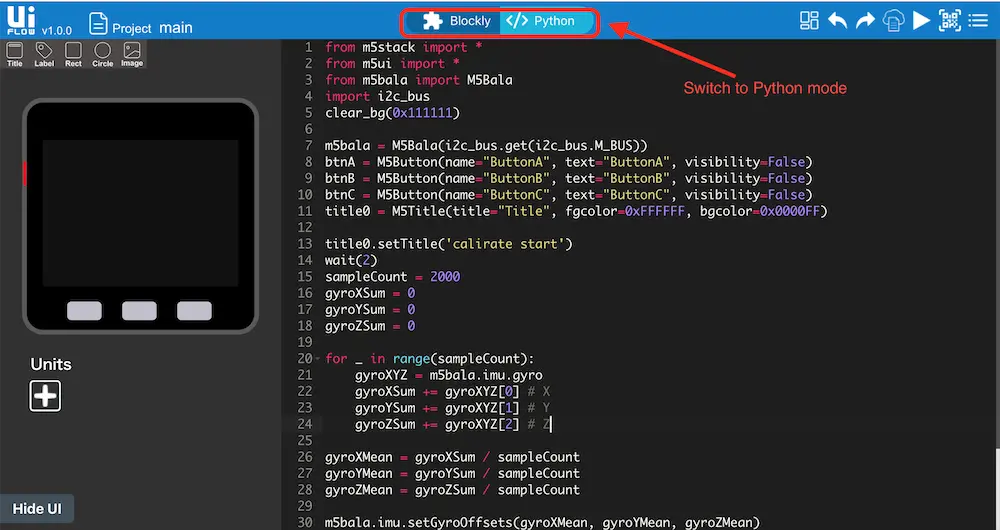
- Copy and paste the following code, and execute the program.
from m5stack import *
from m5ui import *
from m5bala import M5Bala
import i2c_bus
clear_bg(0x111111)
m5bala = M5Bala(i2c_bus.get(i2c_bus.M_BUS))
btnA = M5Button(name="ButtonA", text="ButtonA", visibility=False)
btnB = M5Button(name="ButtonB", text="ButtonB", visibility=False)
btnC = M5Button(name="ButtonC", text="ButtonC", visibility=False)
title0 = M5Title(title="Title", fgcolor=0xFFFFFF, bgcolor=0x0000FF)
title0.setTitle('calibrate start')
wait(2)
sampleCount = 2000
gyroXSum = 0
gyroYSum = 0
gyroZSum = 0
for _ in range(sampleCount):
gyroXYZ = m5bala.imu.gyro
gyroXSum += gyroXYZ[0] # X
gyroYSum += gyroXYZ[1] # Y
gyroZSum += gyroXYZ[2] # Z
gyroXMean = gyroXSum / sampleCount
gyroYMean = gyroYSum / sampleCount
gyroZMean = gyroZSum / sampleCount
m5bala.imu.setGyroOffsets(gyroXMean, gyroYMean, gyroZMean)
title0.setTitle('balance start')
while True:
m5bala.balance()
wait(0.001)Arduino IDE Editing
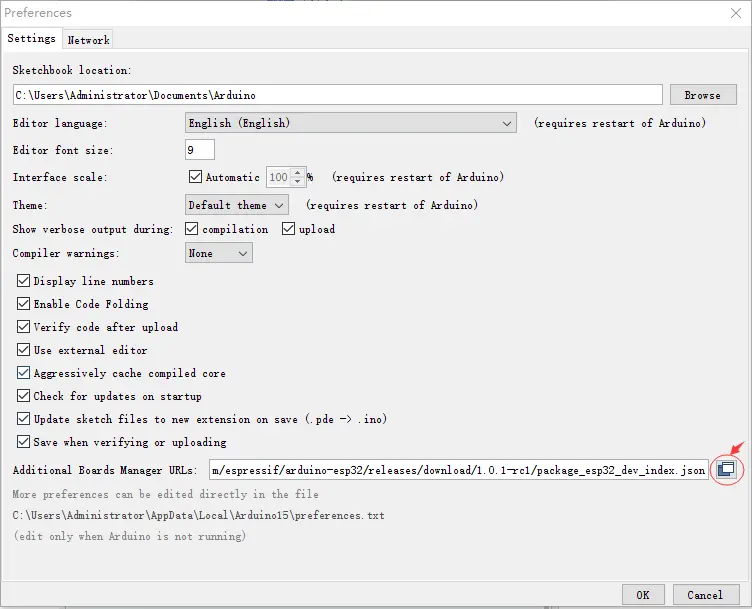
- Install the
m5stacklibrary in the Arduino IDE's Library Manager.
<img src="https://static
-cdn.m5stack.com/resource/docs/static/assets/img/getting_started_pics/m5bala/bala_quick_start_19.webp" width="100%">
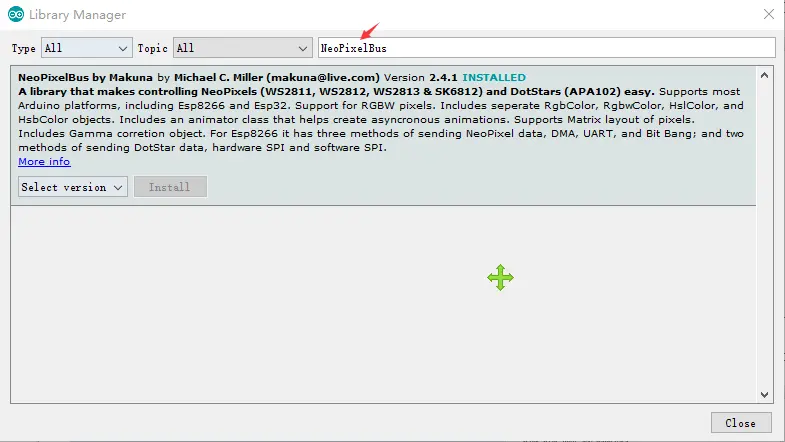
- Install the
NeoPixelBuslibrary in the Arduino IDE's Library Manager.
- Install the
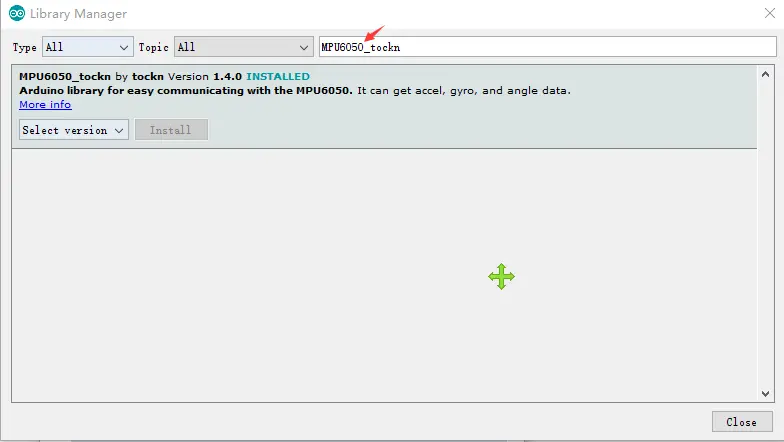
MPU6050_tocknlibrary in the Arduino IDE's Library Manager.
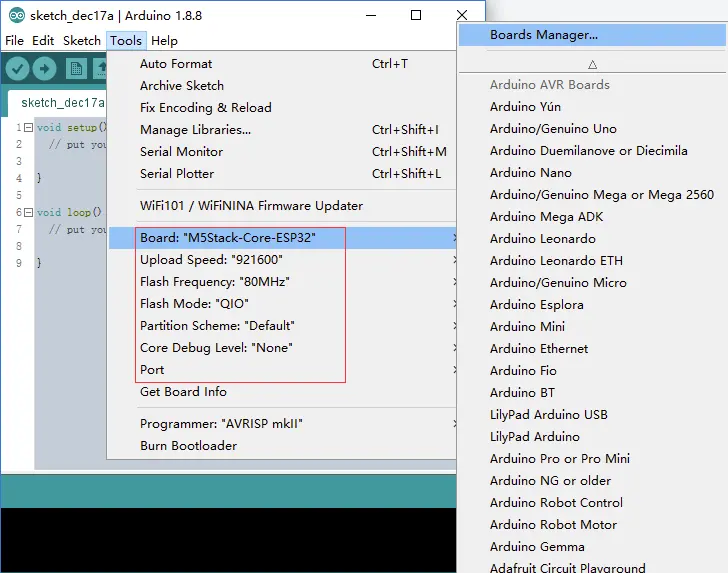
Connect the M5Core to the computer. Click
Tools->Portand select the serial port used by the device.For the
Boardoption, selectM5Stack-Core-ESP32orM5Stack-Fire.
- Use the Shell command to download the M5Bala example programs. If you have not installed Git yet, click here to download.
git clone --recursive https://github.com/m5stack/M5Bala.git- Click
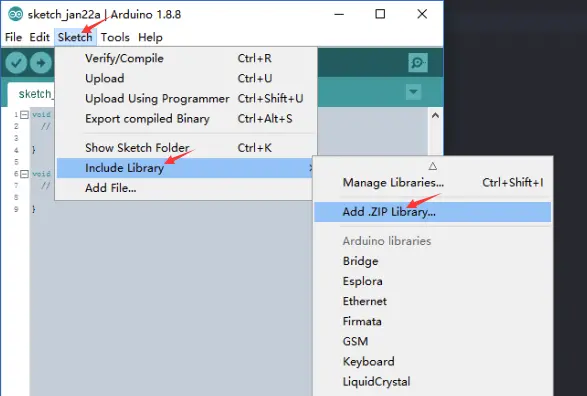
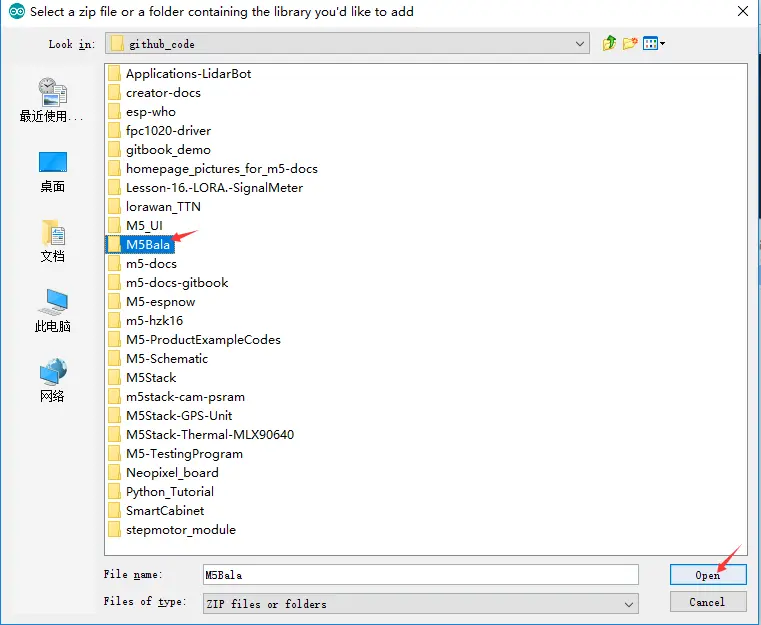
Sketch->Include Library->Add .ZIP Library.... Choose the downloadedM5Balafile.
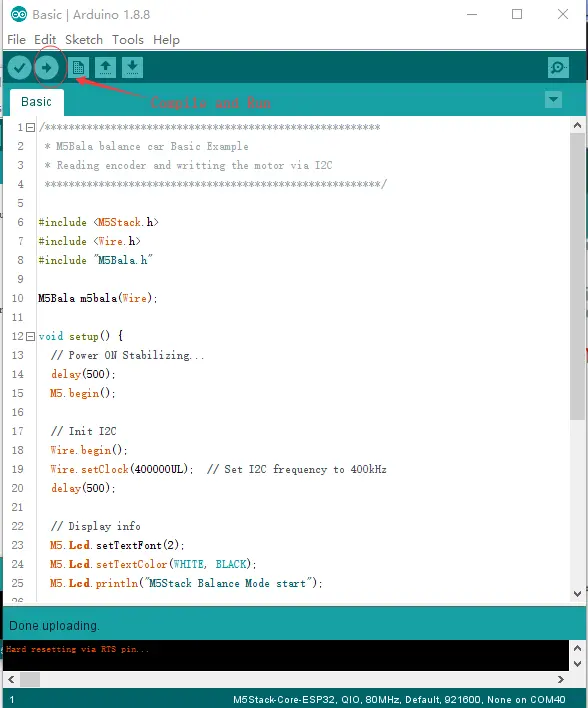
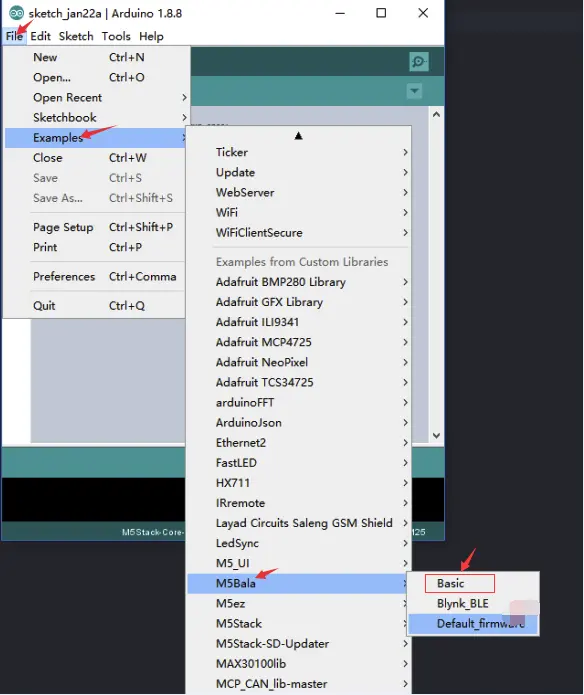
- Open the BALA program example: Click
File->Examples->M5Bala->Basic.
- Compile and upload the program.