

Product Guide
Linux PC
CardputerZero
AI Accelerator Card
LLM-8850 Card
Large Language Models
AI & Agent
Real-Time AI Voice Assistant
XiaoZhi Voice Assistant
AtomS3R-M12 Volcengine Kit
Offline Voice Recognition
Industrial Control
IoT Measuring Instruments
Air Quality
PowerHub
Module13.2 PPS
VAMeter
T-Lite
Input & Output Devices
Ethernet Camera
PoECAM
Wi-Fi Camera
Unit CamS3/-5MP
AI Camera
LoRa & LoRaWAN
Motor Control
Restore Factory Firmware
DIP Switch Usage Guide
Frigate
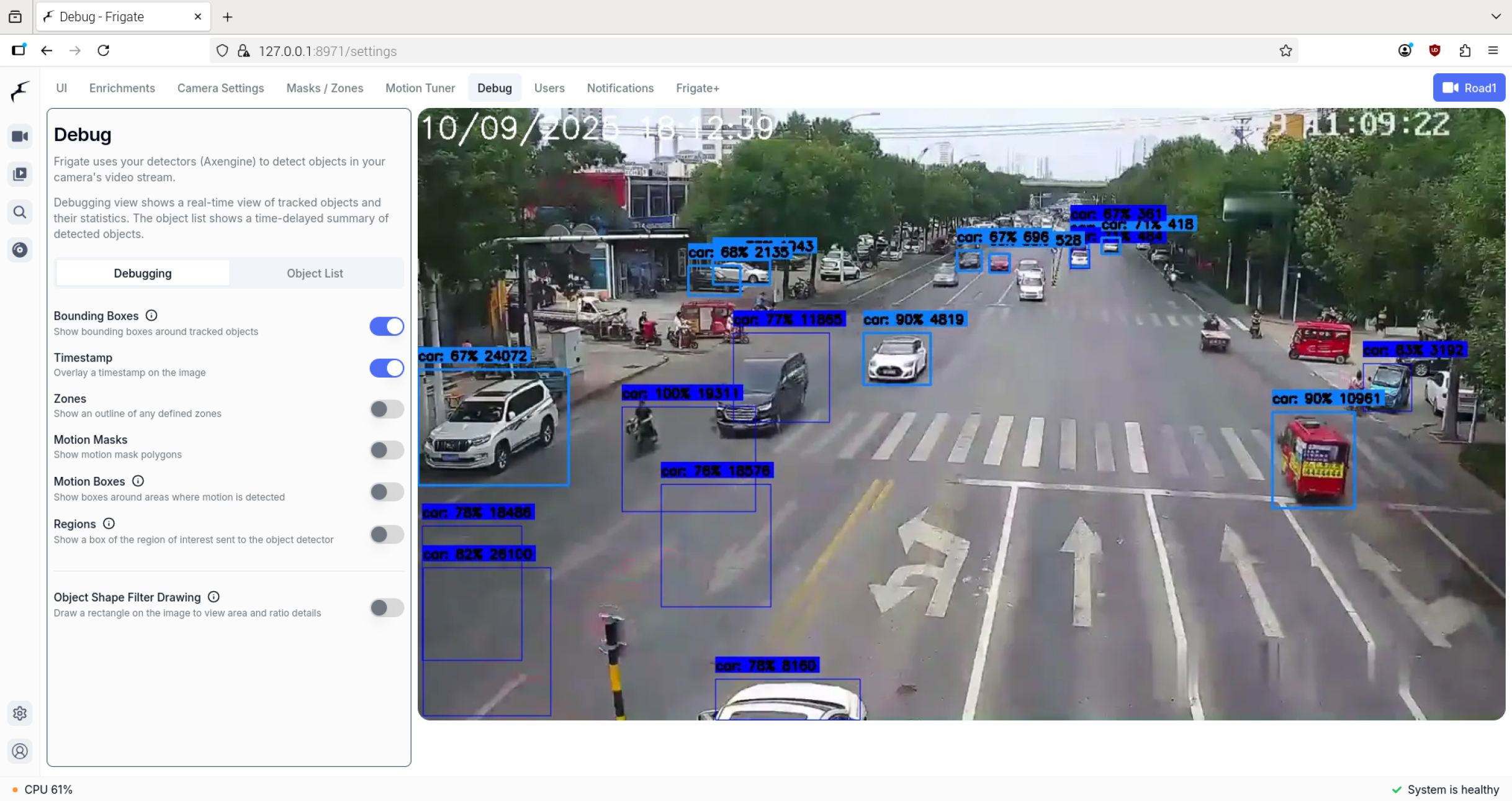
Frigate is an open-source NVR built on real-time AI object detection. All processing is performed locally on your own hardware, and your camera video streams never leave your home.
- Manually download the program and upload it to raspberrypi5, or pull the model repository via the following command.
Tip
If git lfs is not installed, first refer to git lfs installation guide for installation.
git clone -b rpi-axcl https://huggingface.co/AXERA-TECH/frigate-resourceFile description:
m5stack@raspberrypi:~/rsp/frigate-resource $ ls -lh
total 2.8G
-rw-rw-r-- 1 m5stack m5stack 48M Oct 9 16:46 axcl_host_aarch64_V3.6.5_20250908154509_NO4973.deb
-rw-rw-r-- 1 m5stack m5stack 648 Oct 9 16:41 docker-compose.yml
-rw-rw-r-- 1 m5stack m5stack 2.8G Oct 9 16:46 frigate-rpi-axcl-f8f387a.tar
-rw-rw-r-- 1 m5stack m5stack 3.7K Oct 9 16:41 README.md- Import docker image
Tip
If docker is not installed, first refer to RaspberryPi docker installation guide for installation.
docker load -i frigate-resource/frigate-rpi-axcl-f8f387a.tar # The image file may be updated, use the actual file name.- Prepare the working directory
mkdir -p ~/frigate-runtime/{config,storage}
cp frigate-resource/docker-compose.yml ~/frigate-runtime/- Start the container
cd ~/frigate-runtime/
docker compose up -d- Access Frigate management Web via https://server_ip:8971
Tip
Default username admin Default password axera123456
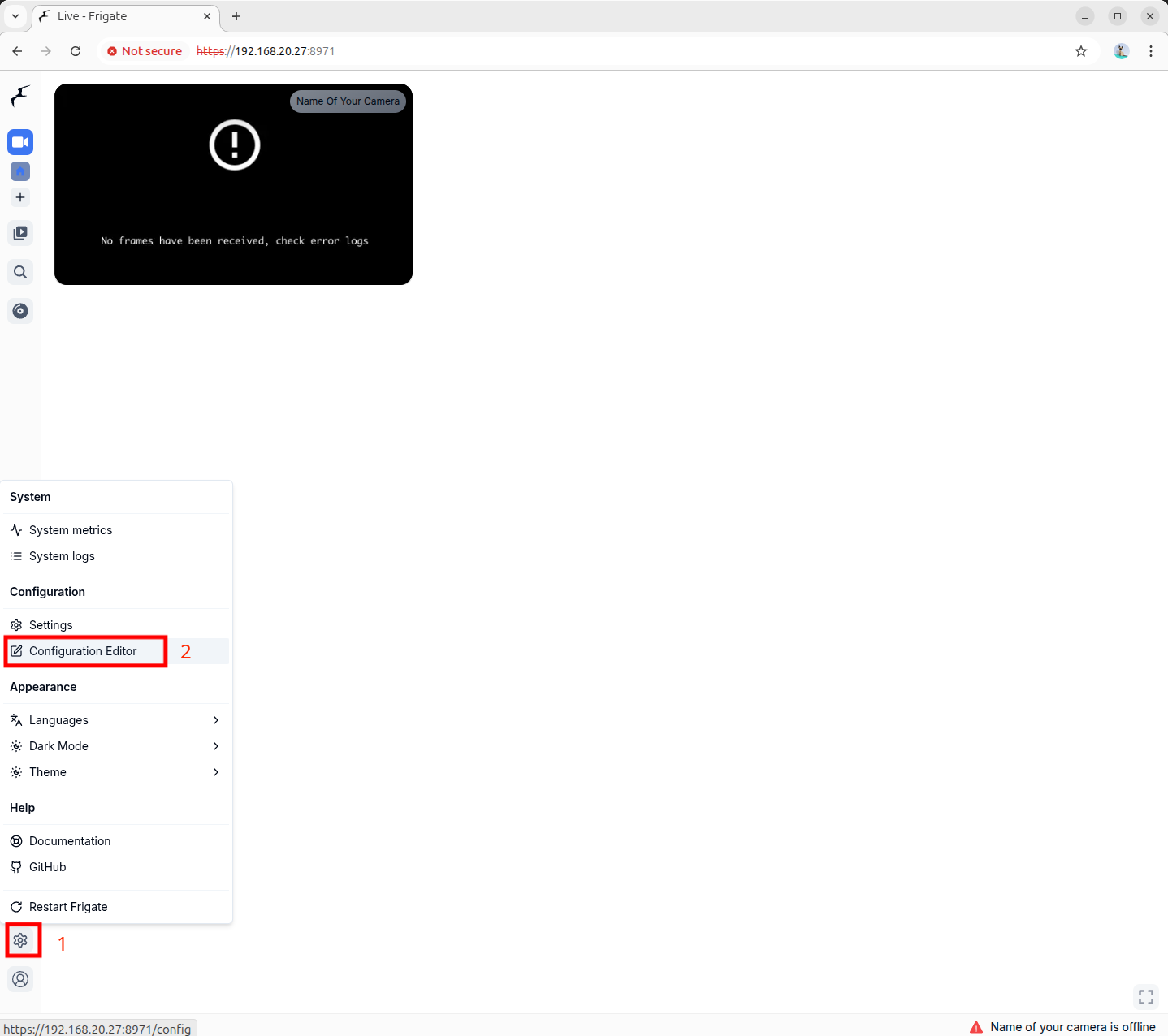
- Click settings, configure parameters, enter the following content. Modify the go2rtc part to your own IP Camera address, save and restart.
Configuration example:
#ffmpeg global variables, required
ffmpeg:
global_args: ["-hide_banner", "-loglevel", "warning", "-threads", "1"]
output_args:
detect: ["-threads", "1", "-f", "rawvideo", "-pix_fmt", "yuv420p"]
mqtt:
enabled: false
go2rtc:
streams:
#main stream
road1:
- rtsp://192.168.20.57:8554/road1.264
#sub stream
road1_sub:
- rtsp://192.168.20.57:8554/road1_sub.264
cameras:
road1:
enabled: true
ffmpeg:
inputs:
#path to the recording stream, here using the main stream set in go2rtc
#during debugging, you can use local stream files here
- path: rtsp://127.0.0.1:8554/road1
roles:
- record
#path to the detection stream, here using the sub stream set in go2rtc
#during debugging, you can use local stream files here
- path: rtsp://127.0.0.1:8554/road1_sub
roles:
- detect
#preset-rpi-64-h264 for decoding h264 stream
#preset-rpi-64-h265 for decoding h265 stream
hwaccel_args: preset-rpi-64-h264
record:
enabled: true
#Enable detection function
#If detection width/height is not set, it will default to the native resolution of the detection stream
detect:
enabled: true
width: 1280
height: 720
fps: 5
#Configure detection engine to use axengine
detectors:
axengine:
type: axengine
#Configure object detection model for axengine
model:
path: yolov5s_320
width: 320
height: 320
input_pixel_format: bgr
labelmap_path: /labelmap/coco-80.txt
#Object types to track
objects:
track:
- person
- car
- bicycle
- motorcycle
version: 0.16-0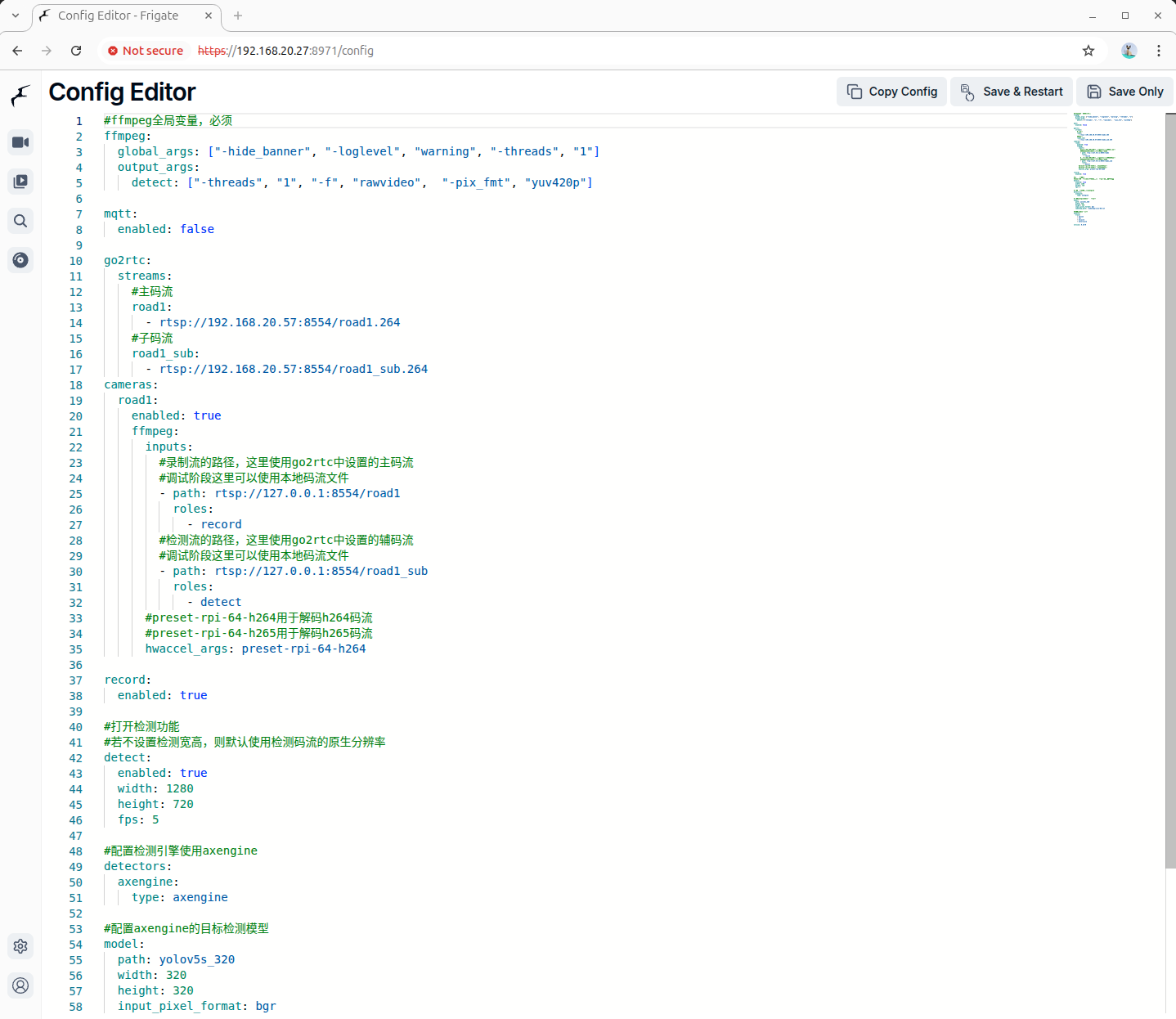
You can preview the configuration in settings
Page Tools