

产品上手指引
Linux PC
CardputerZero
AI 加速卡
LLM-8850 Card
AI 智能体
实时 AI 语音助手
火山引擎语音助手
工业控制
Ethernet 摄像头
PoECAM
Wi-Fi 摄像头
Unit CamS3/-5MP
AI 摄像头
LoRa & LoRaWAN
电机驱动
恢复出厂固件教程
拨码开关&引脚切换
M5StickV Maixpy 上手指南
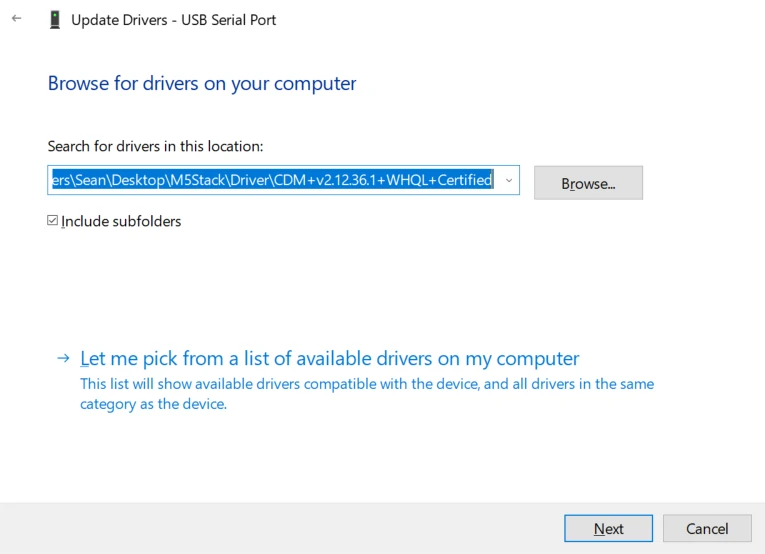
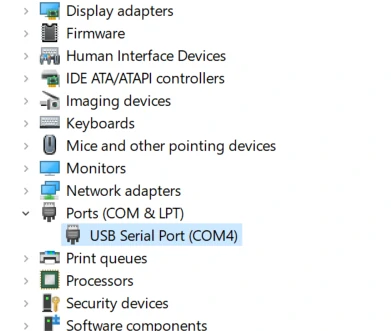
驱动安装
M5Stack或USB Serial。对于 Windows 用户,我们推荐使用驱动文件在设备管理器直接进行安装,可执行文件安装方式可能无法正常工作)。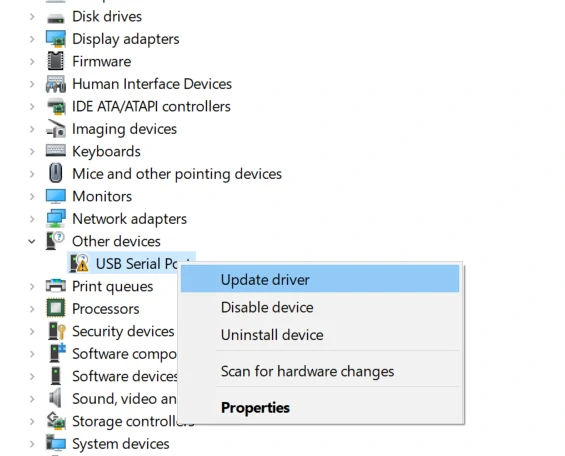
系统偏好设置 - >安全性与隐私 - >通用 - >允许以下位置下载的App - > App Store和认可的开发者选项。固件烧录
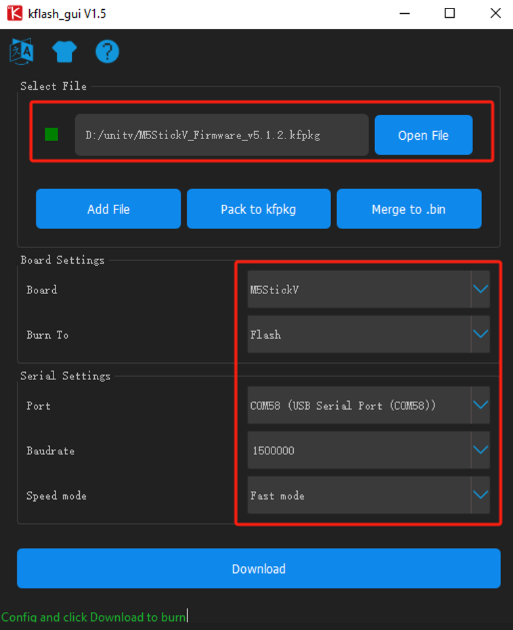
Kflash_GUI
1. 下载固件和 Kflash_GUI 烧录工具。( UnitV 和 StickV 使用的是相同的固件)
| 固件版本 | 下载链接 |
|---|---|
| M5StickV_Firmware_v5.1.2.kfpkg | Download |
2. 将设备连接至电脑,打开烧录工具Kflash_GUI,选择对应的设备端口、开发板类型 (M5StickV)、固件程序、波特率。点击下载,开始烧录。
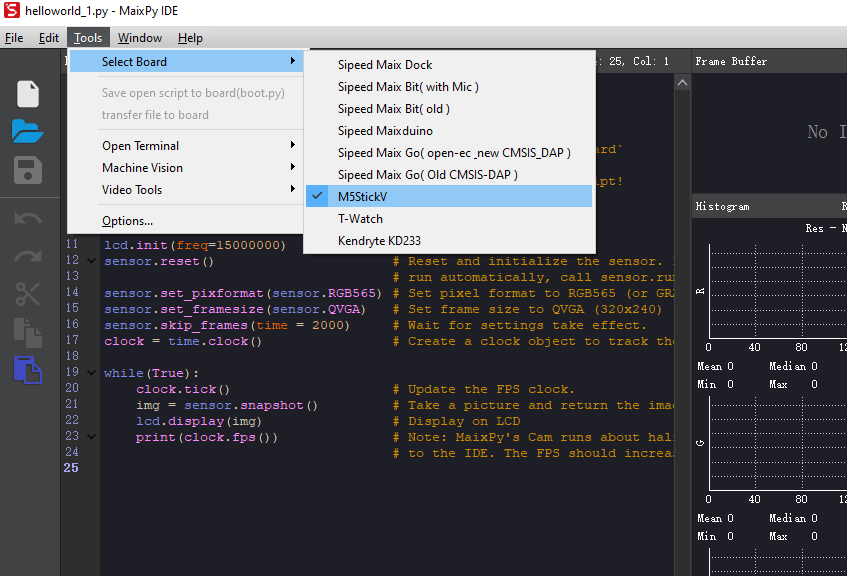
MaixPy IDE
MaixPy IDE 能够便捷的实现脚本程序的实时编辑、执行,以及实时监控摄像头图像,文件传输等功能。 MaixPy IDE 适合初学者以及想要快速搭建项目的开发者使用。
运行 MaixPy IDE, 点击工具栏,选择开发板型号。Tools-> Select Board-> M5StickV
点击左下角的连接按钮,并选择正确的连接端口,点击 OK。
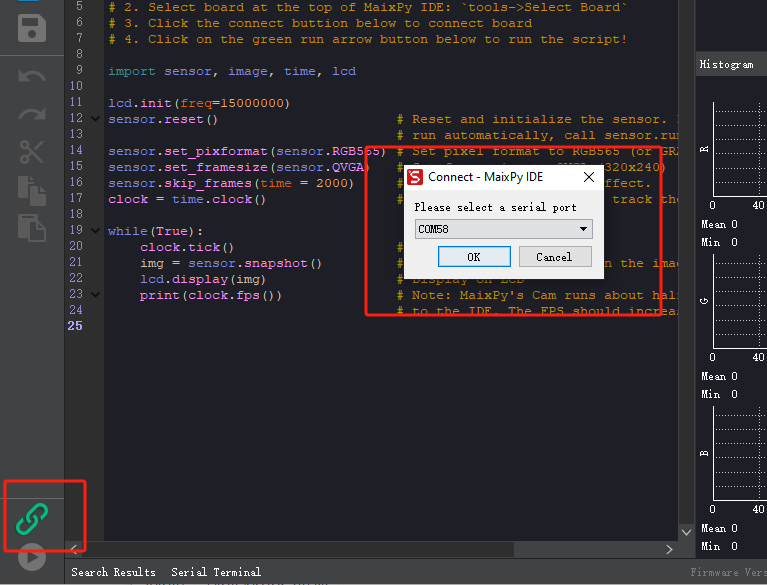
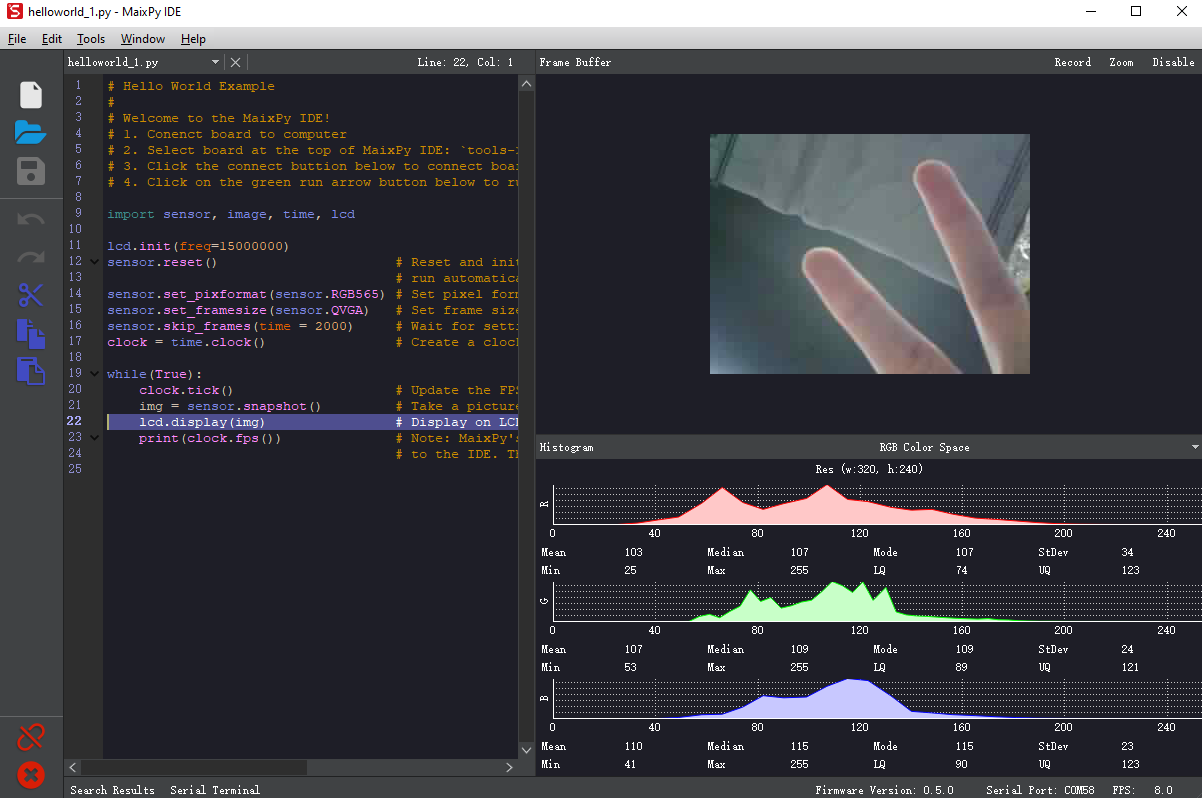
当连接按钮变为红色时表示已经连接成功,你可以在上方的文本框编辑代码,并点击左下角的运行按钮执行。
串口调试工具
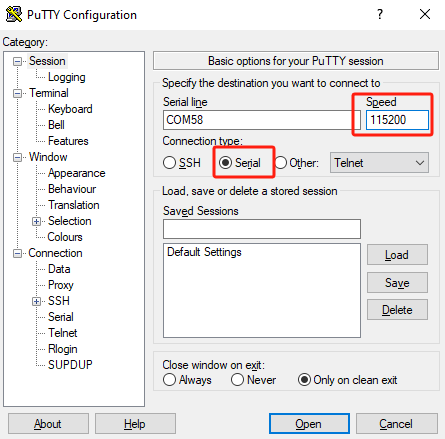
1. 设备的 USB 将默认启用为系统 log 端口,用户可使用该接口连接至电脑,使用任何终端工具进行访问,默认波特率为115200bps, 以下的操作说明基于 Putty。
2. 运行 Putty 后,将设备连接至电脑,在 Putty 中设置相应的端口号与波特率,点击 Open。
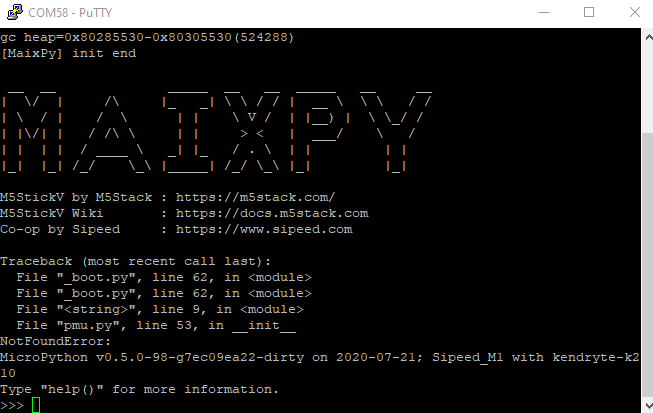
3. 连接成功后,将自动进入 MaixPy 的交互界面。此时设备正在运行默认程序,可以通过按下快捷键 "Ctrl+C" 中断其运行,并进入命令行。
编辑与运行文件
编辑文件
在 MaixPy 中,内置了一款开源编辑器 Micropython Editor(pye), 可以方便的修改程序文件。
使用 os.listdir() 可以查看当前目录下的文件,
使用 pye("hello.py") 可以创建文件并进入编辑模式,快捷键等使用说明可以在这里查看
完成编辑后,按 Ctrl+S > Enter 键进行保存,按 Ctrl+Q 退出编辑
注意: 必须使用 Del 键来代替 Backspace 键,Backspace 键默认会触发 Ctrl+H。
运行程序
使用 os.chdir() 切换工作目录,比如 os.chdir("/flash")
方法一:直接在命令行中逐行执行 Python 代码
执行 import hello,即可看到输出 hello maixpy
需要注意的是,import 只能执行一次,多次 import 将不会执行。如果需要多次执行,建议按照如下方法运行 .py 文件
方法二:运行 .py 文件
使用 exec() 函数来运行 hello.py
with open("hello.py") as f:
exec(f.read())
开机自动运行脚本
系统会在 /flash 或者 /sd 目录创建 boot.py 文件,系统启动时会自动执行此脚本,你可以编辑这个文件来自定义开机时要运行的程序。
MaixPy IDE
MaixPy IDE 能够便捷的实现脚本程序的实时编辑、上传、执行,以及实时监控摄像头图像,文件传输等功能。使用 MaixPy IDE 因为数据的压缩、传输需要耗费一部分资源,所以性能会有所降低,但对性能需求不苛刻,或处于调试阶段的开发者来说这会是一个很不错的开发工具.
Windows 平台可直接双击 exe 文件,运行安装程序.
Linux 命令行给运行权限然后,执行命令
chmod +x maixpy-ide-linux-x86_64-0.2.2.run
./maixpy-ide-linux-x86_64-0.2.2.run
运行 MaixPy IDE, 点击工具栏,选择开发板的型号.Tool-> Select Board-> M5StickV (工具 -> 选择开发板)
点击左下角的连接按钮,并选择正确的连接端口,点击 OK.
当连接按钮由绿色变为红色的时表示,已经连接成功,你可以在上方的编辑框进行代码编辑,点击左下角的运行按钮能够执行代码,进行验证.
WS2812
固件内置了 WS2812 RGB LED 驱动库,以下为参考例程:
from modules import ws2812
from fpioa_manager import *
fm.register(board_info.CONNEXT_A)
class_ws2812 = ws2812(board_info.CONNEXT_A,130)
r=0
dir = True
while True:
if dir:
r += 1
else:
r -= 1
if r>=255:
r = 255
dir = False
elif r<0:
r = 0
dir = True
for i in range(130):
a = class_ws2812.set_led(i,(0,0,r))
a=class_ws2812.display()PMU
说明:使用该 API 实现按钮短按重置,长按睡眠。传入 True 或 False,True 启动按钮检测,False 取消检测。
from pmu import axp192
pmu = axp192()
pmu.enablePMICSleepMode(True)
Maixpy 案例程序
Quoted from: https://github.com/anoken/purin\_wo\_motto\_mimamoru\_gijutsu/tree/master/03\_maixpy\_example
Button
example
import lcd
from Maix import I2S, GPIO
from fpioa_manager import fm
from board import board_info
lcd.init()
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.BUTTON_B, fm.fpioa.GPIO2)
but_b = GPIO(GPIO.GPIO2, GPIO.IN, GPIO.PULL_UP)
but_a_pressed = 0
but_b_pressed = 0
while(True):
if but_a.value() == 0 and but_a_pressed == 0:
print("A_push")
but_a_pressed=1
if but_a.value() == 1 and but_a_pressed == 1:
print("A_release")
but_a_pressed=0
if but_b.value() == 0 and but_b_pressed == 0:
print("B_push")
but_b_pressed=1
if but_b.value() == 1 and but_b_pressed == 1:
print("B_release")
but_b_pressed=0LED
example
from fpioa_manager import *
from Maix import GPIO
from board import board_info
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.BUTTON_B, fm.fpioa.GPIO2)
but_b = GPIO(GPIO.GPIO2, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.LED_W, fm.fpioa.GPIO3)
led_w = GPIO(GPIO.GPIO3, GPIO.OUT)
led_w.value(1) # LED is Active Low
fm.register(board_info.LED_R, fm.fpioa.GPIO4)
led_r = GPIO(GPIO.GPIO4, GPIO.OUT)
led_r.value(1) # LED is Active Low
fm.register(board_info.LED_G, fm.fpioa.GPIO5)
led_g = GPIO(GPIO.GPIO5, GPIO.OUT)
led_g.value(1) # LED is Active Low
fm.register(board_info.LED_B, fm.fpioa.GPIO6)
led_b = GPIO(GPIO.GPIO6, GPIO.OUT)
led_b.value(1) # LED is Active Low
lcd.init()
while(True):
if but_a.value() == 0:
led_w.value(0)
led_r.value(1)
led_g.value(1)
led_b.value(1)
elif but_b.value()== 0:
led_w.value(1)
led_r.value(0)
led_g.value(1)
led_b.value(1)
else:
led_w.value(1)
led_r.value(1)
led_g.value(1)
led_b.value(1)PWM
example
import time,math
from machine import Timer,PWM
from fpioa_manager import fm
from board import board_info
tim = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PWM)
PWM_ch = PWM(tim, freq=500000, duty=0, pin=board_info.LED_W)
cnt=0
while(True):
duty_val=math.fabs(math.sin(cnt))*100
PWM_ch.duty(duty_val)
cnt=cnt+0.01
time.sleep_ms(10)I2C scan
example
from machine import I2C
i2c = I2C(I2C.I2C0, freq=100000, scl=28, sda=29)
devices = i2c.scan()
print(devices)MPU6886
example
from machine import I2C
import lcd
MPU6886_ADDRESS=0x68
MPU6886_WHOAMI=0x75
MPU6886_ACCEL_INTEL_CTRL= 0x69
MPU6886_SMPLRT_DIV=0x19
MPU6886_INT_PIN_CFG= 0x37
MPU6886_INT_ENABLE=0x38
MPU6886_ACCEL_XOUT_H= 0x3B
MPU6886_TEMP_OUT_H=0x41
MPU6886_GYRO_XOUT_H= 0x43
MPU6886_USER_CTRL= 0x6A
MPU6886_PWR_MGMT_1=0x6B
MPU6886_PWR_MGMT_2=0x6C
MPU6886_CONFIG=0x1A
MPU6886_GYRO_CONFIG= 0x1B
MPU6886_ACCEL_CONFIG= 0x1C
MPU6886_ACCEL_CONFIG2= 0x1D
MPU6886_FIFO_EN= 0x23
i2c = I2C(I2C.I2C0, freq=100000, scl=28, sda=29)
devices = i2c.scan()
time.sleep_ms(10)
print("i2c",devices)
def write_i2c(address, value):
i2c.writeto_mem(MPU6886_ADDRESS, address, bytearray([value]))
time.sleep_ms(10)
def MPU6866_init():
write_i2c(MPU6886_PWR_MGMT_1, 0x00)
write_i2c(MPU6886_PWR_MGMT_1, 0x01<<7)
write_i2c(MPU6886_PWR_MGMT_1,0x01<<0)
write_i2c(MPU6886_ACCEL_CONFIG,0x10)
write_i2c(MPU6886_GYRO_CONFIG,0x18)
write_i2c(MPU6886_CONFIG,0x01)
write_i2c(MPU6886_SMPLRT_DIV,0x05)
write_i2c(MPU6886_INT_ENABLE,0x00)
write_i2c(MPU6886_ACCEL_CONFIG2,0x00)
write_i2c(MPU6886_USER_CTRL,0x00)
write_i2c(MPU6886_FIFO_EN,0x00)
write_i2c(MPU6886_INT_PIN_CFG,0x22)
write_i2c(MPU6886_INT_ENABLE,0x01)
def MPU6866_read():
accel = i2c.readfrom_mem(MPU6886_ADDRESS, MPU6886_ACCEL_XOUT_H, 6)
accel_x = (accel[0]<<8|accel[1])
accel_y = (accel[2]<<8|accel[3])
accel_z = (accel[4]<<8|accel[5])
if accel_x>32768:
accel_x=accel_x-65536
if accel_y>32768:
accel_y=accel_y-65536
if accel_z>32768:
accel_z=accel_z-65536
return accel_x,accel_y,accel_z
MPU6866_init()
lcd.init()
lcd.clear()
aRes = 8.0/32768.0;
while True:
x,y,z=MPU6866_read()
accel_array = [x*aRes, y*aRes, z*aRes]
print(accel_array);
lcd.draw_string(20,50,"x:"+str(accel_array[0]))
lcd.draw_string(20,70,"y:"+str(accel_array[1]))
lcd.draw_string(20,90,"z:"+str(accel_array[2]))
time.sleep_ms(10)SH200Q
example
from machine import I2C
import lcd
i2c = I2C(I2C.I2C0, freq=100000, scl=28, sda=29)
devices = i2c.scan()
print("i2c",devices)
SH200I_ADDRESS=108
SH200I_WHOAMI= 0x30
SH200I_ACC_CONFIG= 0x0E
SH200I_GYRO_CONFIG= 0x0F
SH200I_GYRO_DLPF= 0x11
SH200I_FIFO_CONFIG= 0x12
SH200I_ACC_RANGE= 0x16
SH200I_GYRO_RANGE= 0x2B
SH200I_OUTPUT_ACC= 0x00
SH200I_OUTPUT_GYRO= 0x06
SH200I_OUTPUT_TEMP= 0x0C
SH200I_REG_SET1= 0xBA
SH200I_REG_SET2= 0xCA #ADC reset
SH200I_ADC_RESET= 0xC2 #drive reset
SH200I_SOFT_RESET= 0x7F
SH200I_RESET= 0x75
def write_i2c(address, value):
i2c.writeto_mem(SH200I_ADDRESS, address, bytearray([value]))
time.sleep_ms(10)
def SH200I_init():
# FIFO reset
write_i2c(SH200I_FIFO_CONFIG, 0x00)
# Chip ID default=0x18
tempdata = i2c.readfrom_mem(SH200I_ADDRESS, 0x30, 1);
print ("ChipID:", tempdata);
#sh200i_ADCReset
tempdata = i2c.readfrom_mem(SH200I_ADDRESS, SH200I_ADC_RESET, 1);
tempdata = tempdata[0] | 0x04
write_i2c(SH200I_ADC_RESET, tempdata)
tempdata = tempdata & 0xFB
write_i2c(SH200I_ADC_RESET, tempdata)
tempdata = i2c.readfrom_mem(SH200I_ADDRESS, 0xD8, 1)
tempdata = tempdata[0] | 0x80
write_i2c(0xD8, tempdata)
tempdata = tempdata & 0x7F;
write_i2c(0xD8, tempdata)
write_i2c(0x78, 0x61)
write_i2c(0x78, 0x00)
#set acc odr 256hz
# 0x81 1024hz //0x89 512hz //0x91 256hz
write_i2c(SH200I_ACC_CONFIG, 0x91)
# set gyro odr 500hz
#0x11 1000hz //0x13 500hz //0x15 256hz
write_i2c(SH200I_GYRO_CONFIG, 0x13)
# set gyro dlpf 50hz
#0x00 250hz //0x01 200hz 0x02 100hz 0x03 50hz 0x04 25hz
write_i2c(SH200I_GYRO_DLPF, 0x03)
# set no buffer mode
write_i2c(SH200I_FIFO_CONFIG, 0x00)
# set acc range +-8G
write_i2c(SH200I_ACC_RANGE, 0x01)
# set gyro range +-2000DPS/s
write_i2c(SH200I_GYRO_RANGE, 0x00)
tempdata = 0xC0;
write_i2c(SH200I_REG_SET1, 0xC0)
tempdata = i2c.readfrom_mem(SH200I_ADDRESS, SH200I_REG_SET2, 1)
tempdata = tempdata[0] | 0x10
# ADC Reset
write_i2c(SH200I_REG_SET2, tempdata)
tempdata = tempdata | 0xEF
write_i2c(SH200I_REG_SET2, tempdata)
def SH200I_acc_read():
accel = i2c.readfrom_mem(SH200I_ADDRESS, SH200I_OUTPUT_ACC, 6)
accel_x = (accel[1]<<8|accel[0]);
accel_y = (accel[3]<<8|accel[2]);
accel_z = (accel[5]<<8|accel[4]);
if accel_x>32768:
accel_x=accel_x-65536
if accel_y>32768:
accel_y=accel_y-65536
if accel_z>32768:
accel_z=accel_z-65536
return accel_x,accel_y,accel_z
SH200I_init()
lcd.init()
lcd.clear()
aRes = 8.0/32768.0;
while True:
x,y,z=SH200I_acc_read()
accel_array = [x*aRes, y*aRes, z*aRes]
print(accel_array);
lcd.draw_string(20,50,"x:"+str(accel_array[0]))
lcd.draw_string(20,70,"y:"+str(accel_array[1]))
lcd.draw_string(20,90,"z:"+str(accel_array[2]))
time.sleep_ms(10)AXP192
example
import pmu,lcd
lcd.init()
lcd.clear()
axp = pmu.axp192()
axp.enableADCs(True)
while True:
vbat = axp.getVbatVoltage()
usb_vol = axp.getUSBVoltage()
usb_cur = axp.getUSBInputCurrent()
connext_vol = axp.getConnextVoltage()
connext_input_current = axp.getConnextInputCurrent()
bat_current= axp.getBatteryChargeCurrent()
bat_dis_current = axp.getBatteryDischargeCurrent()
bat_instant_watts = axp.getBatteryInstantWatts()
temp = axp.getTemperature()
lcd.draw_string(20,0,"usb_vol:"+str(usb_vol))
lcd.draw_string(20,15,"usb_cur:"+str(usb_cur))
lcd.draw_string(20,30,"connext_vol:"+str(connext_vol))
lcd.draw_string(20,45,"connext_input_current:"+str(connext_input_current))
lcd.draw_string(20,60,"bat_current:"+str(bat_current))
lcd.draw_string(20,75,"bat_dis_current:"+str(bat_dis_current))
lcd.draw_string(20,90,"bat_instant_watts:"+str(bat_instant_watts))
lcd.draw_string(20,105,"temp:"+str(temp))Screen Brightness
example
import lcd #for test
from machine import I2C
AXP192_ADDR=0x34
Backlight_ADDR=0x91
level=50
i2c = I2C(I2C.I2C0, freq=100000, scl=28, sda=29)
val = (level+7) << 4
i2c.writeto_mem(AXP192_ADDR, Backlight_ADDR,int(val))
}Image Display
example
import sensor,image,lcd
lcd.init()
lcd.rotation(2)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.run(1)
while True:
img=sensor.snapshot()
lcd.display(img)SD
example
import sensor, image, lcd, os
from Maix import I2S, GPIO
from fpioa_manager import fm
from board import board_info
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.BUTTON_B, fm.fpioa.GPIO2)
but_b = GPIO(GPIO.GPIO2, GPIO.IN, GPIO.PULL_UP)
is_button_a = 0
is_button_b = 0
lcd.init()
lcd.rotation(2)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.run(1)
path = "/sd/"
ext=".jpg"
cnt=0
img_read = image.Image()
#os.mkdir("save")
print(os.listdir())
while True:
if is_button_b == 1:
lcd.display(img_read)
else :
img=sensor.snapshot()
lcd.display(img)
if but_a.value() == 0 and is_button_a == 0:
print("save image")
cnt+=1
fname=path+str(cnt)+ext
print(fname)
img.save(fname, quality=95)
is_button_a=1
if but_a.value() == 1 and is_button_a == 1:
is_button_a=0
if but_b.value() == 0 and is_button_b == 0:
fname=path+str(cnt)+ext
print(fname)
img_read = image.Image(fname)
is_button_b=1
if but_b.value() == 1 and is_button_b == 1:
is_button_b=0Filter
example
import sensor,image,lcd,gc,time,uos
from fpioa_manager import *
from Maix import I2S, GPIO
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
fm.register(board_info.BUTTON_B, fm.fpioa.GPIO2)
but_b = GPIO(GPIO.GPIO2, GPIO.IN, GPIO.PULL_UP)
isButtonPressedA = 0
isButtonPressedB = 0
lcd.init()
lcd.rotation(2)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing((224, 224))
sensor.run(1)
cnt=0
while True:
if but_a.value() == 0 and isButtonPressedA == 0:
cnt=cnt+1
isButtonPressedA=1
if but_a.value() == 1 and isButtonPressedA == 1:
isButtonPressedA=0
img = sensor.snapshot()
if cnt==1:
img.negate()
img.draw_string(10,60, "negate",color=(255,0,0))
elif cnt==2:
img.cartoon(seed_threshold=0.05, floating_thresholds=0.05)
img.draw_string(10,60, "cartoon",color=(255,0,0))
elif cnt==3:
img.histeq(adaptive=True, clip_limit=3)
img.draw_string(10,60, "histeq",color=(255,0,0))
elif cnt==4:
img.mode(1)
img.draw_string(10,60, "mode",color=(255,0,0))
elif cnt==5:
thresholds = (90, 100, -128, 127, -128, 127)
img.binary([thresholds], invert=False, zero=True)
img.draw_string(10,60, "binary",color=(255,0,0))
elif cnt==6:
img.laplacian(1)
img.draw_string(10,60, "laplacian",color=(255,0,0))
elif cnt==7:
img.gamma_corr(gamma = 0.5, contrast = 1.0, brightness = 0.0)
img.draw_string(10,60, "gamma_corr",color=(255,0,0))
elif cnt==8:
img.gaussian(1)
img.draw_string(10,60, "gaussian",color=(255,0,0))
elif cnt==9:
img.histeq()
img.draw_string(10,60, "histeq",color=(255,0,0))
elif cnt==10:
img.lens_corr(strength = 1.8, zoom = 1.0)
img.draw_string(10,60, "lens_corr",color=(255,0,0))
elif cnt==11:
img.linpolar(reverse=False)
img.draw_string(10,60, "linpolar",color=(255,0,0))
elif cnt==12:
img.logpolar(reverse=False)
img.draw_string(10,60, "logpolar",color=(255,0,0))
elif cnt==13:
img.mean(1)
img.draw_string(10,60, "mean",color=(255,0,0))
elif cnt==14:
img.median(1, percentile=0.5)
img.draw_string(10,60, "median",color=(255,0,0))
elif cnt==15:
img.midpoint(1, bias=0.5)
img.draw_string(10,60, "midpoint",color=(255,0,0))
elif cnt==16:
img.bilateral(3, color_sigma=0.1, space_sigma=1)
img.draw_string(10,60, "bilateral",color=(255,0,0))
else :
cnt=0
lcd.display(img)
Advanced
example
import sensor, image, lcd, time
from fpioa_manager import fm
from Maix import I2S, GPIO
lcd.init()
lcd.rotation(2)
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.run(1)
origin = (0,0,0, 0,1,0, 0,0,0)
edge = (-1,-1,-1,-1,8,-1,-1,-1,-1)
sharp = (-1,-1,-1,-1,9,-1,-1,-1,-1)
relievo = (2,0,0,0,-1,0,0,0,-1)
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
but_a_pressed = 0
but_b_pressed = 0
cnt=0
while True:
if but_a.value() == 0 and but_a_pressed == 0:
cnt=cnt+1
print("A_push")
but_a_pressed=1
if but_a.value() == 1 and but_a_pressed == 1:
print("A_release")
but_a_pressed=0
img=sensor.snapshot()
if cnt==1:
img.conv3(edge)
img.draw_string(10,60, "edge",color=(255,0,0))
elif cnt==2:
img.conv3(sharp)
img.draw_string(10,60, "sharp",color=(255,0,0))
elif cnt==3:
img.conv3(relievo)
img.draw_string(10,60, "relievo",color=(255,0,0))
else :
cnt=0
lcd.display(img)
File
example
import os
devices = os.listdir("/")
if "flash" in devices:
os.chdir("/flash")
print("flash")
print(os.listdir())
if "sd" in devices:
os.chdir("/sd")
print("sd")
print(os.listdir())
WAV Play
example
from fpioa_manager import *
from Maix import I2S, GPIO
import audio
fm.register(board_info.SPK_SD, fm.fpioa.GPIO0)
spk_sd=GPIO(GPIO.GPIO0, GPIO.OUT)
spk_sd.value(1)
fm.register(board_info.SPK_DIN,fm.fpioa.I2S0_OUT_D1)
fm.register(board_info.SPK_BCLK,fm.fpioa.I2S0_SCLK)
fm.register(board_info.SPK_LRCLK,fm.fpioa.I2S0_WS)
wav_dev = I2S(I2S.DEVICE_0)
def play_wav(fname):
player = audio.Audio(path = fname)
player.volume(20)
wav_info = player.play_process(wav_dev)
wav_dev.channel_config(wav_dev.CHANNEL_1,
I2S.TRANSMITTER,resolution = I2S.RESOLUTION_16_BIT,
align_mode = I2S.STANDARD_MODE)
wav_dev.set_sample_rate(wav_info[1])
while True:
ret = player.play()
if ret == None:
break
elif ret==0:
break
player.finish()
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
but_a_pressed = 0
while True:
if but_a.value() == 0 and but_a_pressed == 0:
play_wav("reset.wav")
but_a_pressed=1
if but_a.value() == 1 and but_a_pressed == 1:
but_a_pressed=0
player.finish()
LCD Draw
example
fimport lcd,math,image
lcd.init()
lcd.rotation(2)
lcd.clear()
x_zero=240//2
y_zero=135//2
x_zero_rot=x_zero
y_zero_rot=y_zero+90
def rot(x_in,y_in,theta):
x_rot = (x_in - x_zero) * math.cos(theta) - (y_in - y_zero) * math.sin(theta) + x_zero_rot;
y_rot = (x_in - x_zero) * math.sin(theta) + (y_in - y_zero) * math.cos(theta) + y_zero_rot;
return int(x_rot),int(y_rot)
def rot2(x_in1,y_in1,x_in2,y_in2,theta):
x_rot1 = (x_in1 - x_zero) * math.cos(theta) - (y_in1 - y_zero) * math.sin(theta) + x_zero_rot;
y_rot1 = (x_in1 - x_zero) * math.sin(theta) + (y_in1 - y_zero) * math.cos(theta) + y_zero_rot;
x_rot2 = (x_in2 - x_zero) * math.cos(theta) - (y_in2 - y_zero) * math.sin(theta) + x_zero_rot;
y_rot2 = (x_in2 - x_zero) * math.sin(theta) + (y_in2 - y_zero) * math.cos(theta) + y_zero_rot;
return int(x_rot1),int(y_rot1),int(x_rot2),int(y_rot2)
def draw_face(img,theta,cnt):
img.draw_rectangle(0,0,240,135,color = (255, 255, 0), fill = True)
if cnt<100:
res = rot(40,70,theta) #left_eye
img.draw_circle(res[0], res[1], 42, color = (0, 0, 0),
thickness = 2, fill = True)
img.draw_circle(res[0], res[1], 40, color = (255, 255, 255),
thickness = 2, fill = True)
img.draw_circle(res[0], res[1], 30, color = (0, 0, 0),
thickness = 2, fill = True)
res = rot(200,70,theta) #right_eye
img.draw_circle(res[0], res[1], 42, color = (0, 0, 0),
thickness = 2, fill = True)
img.draw_circle(res[0], res[1], 40, color = (255, 255, 255),
thickness = 2, fill = True)
img.draw_circle(res[0], res[1], 30, color = (0, 0, 0),
thickness = 2, fill = True)
else :
res = rot2(10,70,80,70,theta)
img.draw_line(res[0], res[1], res[2], res[3], color = (0, 0, 0),
thickness = 10)
res = rot2(170,70,250,70,theta)
img.draw_line(res[0], res[1], res[2], res[3], color = (0, 0, 0),
thickness = 10)
res = rot2(170,10,240,-20,theta)
img.draw_line(res[0], res[1], res[2], res[3], color = (0, 0, 0),
thickness = 15)
res = rot2(70,10,0,-20,theta)
img.draw_line(res[0], res[1], res[2], res[3], color = (0, 0, 0),
thickness = 15)
rot_theta=3.1415/2*3
cnt=0
while True:
img = image.Image()
draw_face(img,rot_theta,cnt)
lcd.display(img)
cnt+=1
if cnt>200:
cnt=0
rot_theta=rot_theta+0.05
Exit
example
import sensor, image, time
clock = time.clock()
print(clock.fps())
sys.exit()
Microphone
example
## M5StickV Mic Record and Speaker Play
## A button is Play
## B button is Record
from Maix import GPIO, I2S, FFT
import image,lcd,math,time,gc,lcd
from board import board_info
from fpioa_manager import *
import audio
# Button
fm.register(board_info.BUTTON_A, fm.fpioa.GPIO1)
fm.register(board_info.BUTTON_B, fm.fpioa.GPIO2)
but_a=GPIO(GPIO.GPIO1, GPIO.IN, GPIO.PULL_UP)
but_b = GPIO(GPIO.GPIO2, GPIO.IN, GPIO.PULL_UP)
#Microphone I2S Initialize
sample_rate = 22050
sample_points = 4096
fm.register(board_info.MIC_LRCLK, fm.fpioa.I2S0_WS, force=True)
fm.register(board_info.MIC_DAT, fm.fpioa.I2S0_IN_D0, force=True)
fm.register(board_info.MIC_CLK, fm.fpioa.I2S0_SCLK, force=True)
mic_dev = I2S(I2S.DEVICE_0)
mic_dev.channel_config(mic_dev.CHANNEL_0, mic_dev.RECEIVER, align_mode=I2S.STANDARD_MODE)
mic_dev.set_sample_rate(sample_rate)
print(mic_dev)
#Speaker I2s Initialize
fm.register(board_info.SPK_SD, fm.fpioa.GPIO0)
spk_sd=GPIO(GPIO.GPIO0, GPIO.OUT)
spk_sd.value(1)
fm.register(board_info.SPK_DIN,fm.fpioa.I2S1_OUT_D1)
fm.register(board_info.SPK_BCLK,fm.fpioa.I2S1_SCLK)
fm.register(board_info.SPK_LRCLK,fm.fpioa.I2S1_WS)
wav_dev = I2S(I2S.DEVICE_1)
print(wav_dev)
#Record Wav File
def record_wav(fname):
lcd.draw_string(20,50,"record_wav")
print("Record Wav File Start")
player = audio.Audio(path=fname, is_create=True, samplerate=sample_rate)
queue = []
for i in range(200):
tmp = mic_dev.record(sample_points)
if len(queue) > 0:
ret = player.record(queue[0])
queue.pop(0)
#lcd.draw_string(20,50,"REC",i)
mic_dev.wait_record()
queue.append(tmp)
player.finish()
lcd.clear()
print("Record Wav File finish")
#Play Wav File
def play_wav(fname):
lcd.draw_string(20,50,"play_wav")
print("Play Wav File Start")
player = audio.Audio(path = fname)
player.volume(100)
wav_info = player.play_process(wav_dev)
wav_dev.channel_config(wav_dev.CHANNEL_1,
I2S.TRANSMITTER,resolution = I2S.RESOLUTION_16_BIT,
align_mode = I2S.STANDARD_MODE)
wav_dev.set_sample_rate(sample_rate)
while True:
ret = player.play()
if ret == None:
break
elif ret==0:
break
player.finish()
lcd.clear()
print("Play Wav File finish")
lcd.init()
lcd.clear()
lcd.rotation(2)
but_stu_a = 1
but_stu_b = 1
while(True):
if but_a.value() == 0 and but_stu_a == 1:
lcd.clear(236, 36, 36)
play_wav("record_1.wav")
but_stu_a = 0
if but_a.value() == 1 and but_stu_a == 0:
but_stu_a = 1
if but_b.value() == 0 and but_stu_b == 1:
lcd.clear(255,255,0)
record_wav("record_1.wav")
but_stu_b = 0
if but_b.value() == 1 and but_stu_b == 0:
but_stu_b = 1