

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
Sensor Kit
以下はM5GOホストコントローラーがM5GO Kitの6つのUnitセンサーを使用するためのサンプルプログラムです。
Unit Angle
M5GOでUnit Angleノブの電圧基準値を取得するサンプルプログラム。
サンプルプログラム
#include <M5Unified.h>
int sensorPin = 36; // ポテンショメータの入力ピンを設定
int last_sensorValue = 100; // センサーから最後に読み取った値を保存
int cur_sensorValue = 0; // 現在センサーから読み取った値を保存
void setup()
{
M5.begin(); // 初期化
pinMode(sensorPin, INPUT); // 指定したピンを入力モードに設定
M5.Lcd.setTextSize(2); // フォントサイズを2に設定
M5.Lcd.print("the value of ANGLE: ");
}
void loop()
{
cur_sensorValue = analogRead(sensorPin); // センサーから値を取得
M5.Lcd.setCursor(0, 25); // カーソルを(0,25)に移動
if (abs(cur_sensorValue - last_sensorValue) > 10) { // チャタリング防止
M5.Lcd.fillRect(0, 25, 100, 25, BLACK);
M5.Lcd.print(cur_sensorValue);
last_sensorValue = cur_sensorValue;
}
delay(50);
} このプログラムはUnit Angleノブの電圧基準値をリアルタイムで取得し、画面に表示します。

Unit ENV
M5GOでUnit ENVを制御し、温度・湿度、気圧、標高の情報を取得するサンプルプログラム。
サンプルプログラム
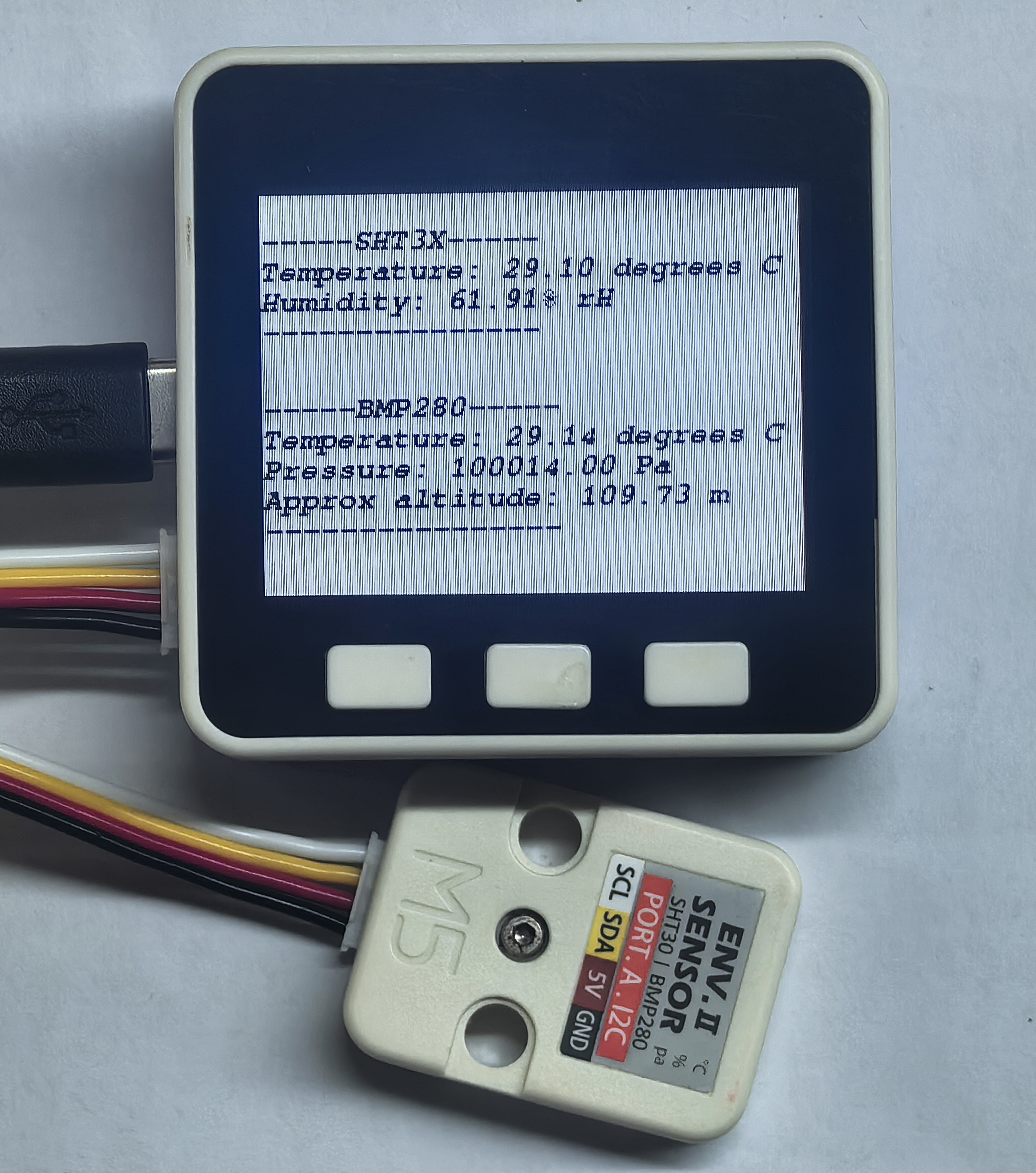
1. M5GO Iot Kit -- Unit ENV-II
#include "M5UnitENV.h"
#include "M5Unified.h"
SHT3X sht3x;
BMP280 bmp;
char ENV_SDA = 21;
char ENV_SCL = 22;
void setup() {
M5.begin();
M5.Display.setTextColor(TFT_BLACK);
M5.Display.setTextFont(&fonts::FreeMonoBoldOblique9pt7b);
M5.Display.clear(TFT_WHITE);
Serial.begin(115200);
if (!sht3x.begin(&Wire, SHT3X_I2C_ADDR, ENV_SDA, ENV_SCL, 400000U)) {
Serial.println("Couldn't find SHT3X\n");
M5.Display.printf("Couldn't find SHT3X");
while (1) delay(1);
}
else{
Serial.println("Find SHT3X\n");
M5.Display.printf("Find SHT3X\n");
}
if (!bmp.begin(&Wire, BMP280_I2C_ADDR, ENV_SDA, ENV_SCL, 400000U)) {
Serial.println("Couldn't find BMP280\n");
M5.Display.printf("Couldn't find BMP280\n");
while (1) delay(1);
}
else{
Serial.println("Find BMP280\n");
M5.Display.printf("Find BMP280\n");
}
/* Default settings from datasheet. */
bmp.setSampling(BMP280::MODE_NORMAL, /* Operating Mode. */
BMP280::SAMPLING_X2, /* Temp. oversampling */
BMP280::SAMPLING_X16, /* Pressure oversampling */
BMP280::FILTER_X16, /* Filtering. */
BMP280::STANDBY_MS_500); /* Standby time. */
delay(2000);
M5.Display.clear(TFT_WHITE);
}
void loop() {
if (sht3x.update()) {
Serial.println("-----SHT3X-----");
Serial.print("Temperature: ");
Serial.print(sht3x.cTemp);
Serial.println(" degrees C");
Serial.print("Humidity: ");
Serial.print(sht3x.humidity);
Serial.println("% rH");
Serial.println("---------------\r\n");
M5.Display.fillRect(0, 0, 320, 120, TFT_WHITE);
M5.Display.setCursor(0, 20);
M5.Display.println("-----SHT3X-----");
M5.Display.print("Temperature: ");
M5.Display.print(sht3x.cTemp);
M5.Display.println(" degrees C");
M5.Display.print("Humidity: ");
M5.Display.print(sht3x.humidity);
M5.Display.println("% rH");
M5.Display.println("---------------\r\n");
}
if (bmp.update()) {
Serial.println("-----BMP280-----");
Serial.print(F("Temperature: "));
Serial.print(bmp.cTemp);
Serial.println(" degrees C");
Serial.print(F("Pressure: "));
Serial.print(bmp.pressure);
Serial.println(" Pa");
Serial.print(F("Approx altitude: "));
Serial.print(bmp.altitude);
Serial.println(" m");
Serial.println("----------------\r\n");
M5.Display.fillRect(0, 120, 320, 120, TFT_WHITE);
M5.Display.setCursor(0, 120);
M5.Display.println("-----BMP280-----");
M5.Display.print(F("Temperature: "));
M5.Display.print(bmp.cTemp);
M5.Display.println(" degrees C");
M5.Display.print(F("Pressure: "));
M5.Display.print(bmp.pressure);
M5.Display.println(" Pa");
M5.Display.print(F("Approx altitude: "));
M5.Display.print(bmp.altitude);
M5.Display.println(" m");
M5.Display.println("----------------\r\n");
}
delay(1000);
} このプログラムは、画面上に SHT3X と BMP280 で取得した温度・湿度、気圧、標高の情報を1秒ごとに表示します。
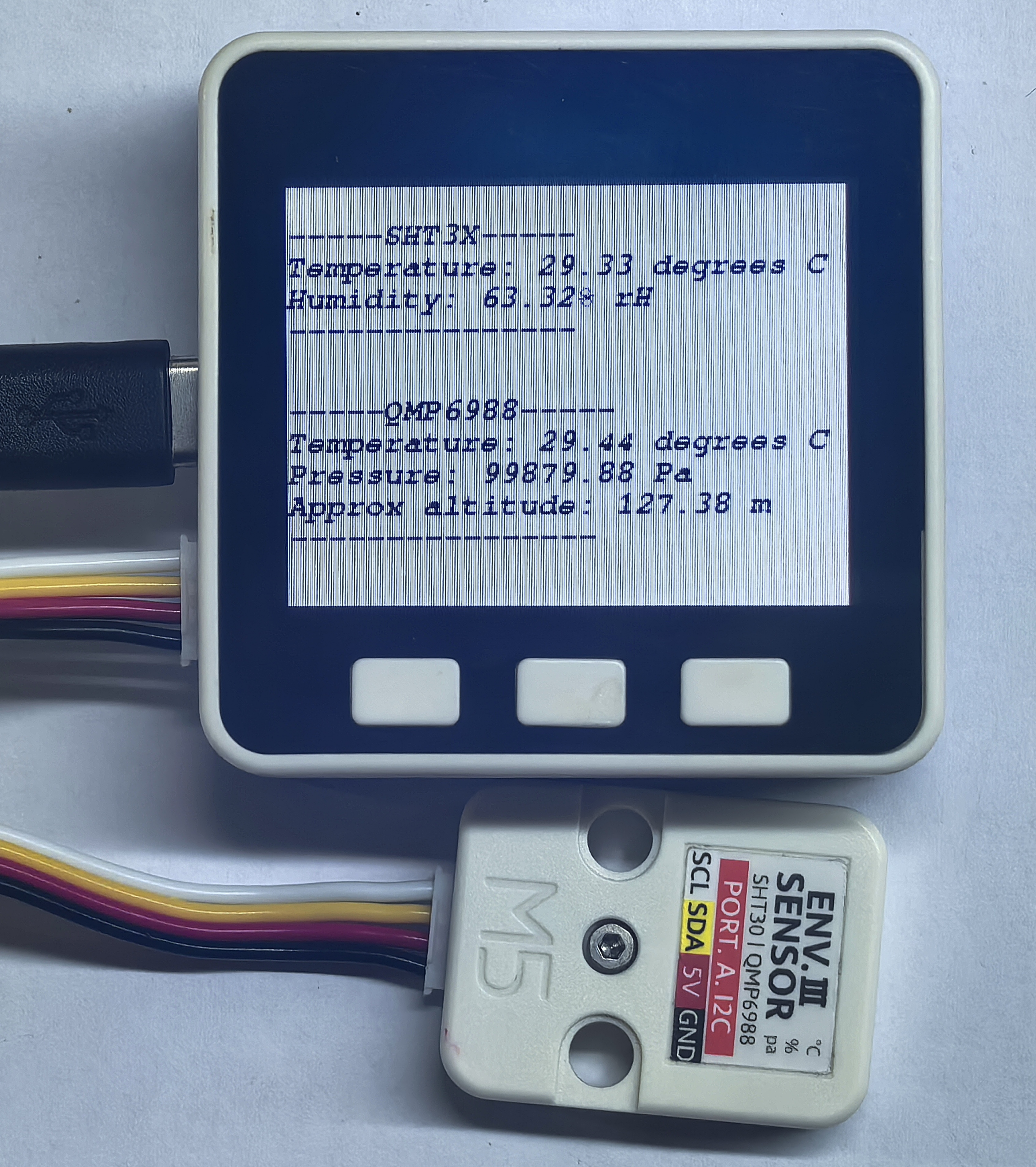
2. M5GO Iot Kit 2.6 / M5GO Iot Kit 2.7 -- Unit ENV-II
#include "M5UnitENV.h"
#include "M5Unified.h"
SHT3X sht3x;
QMP6988 qmp;
char ENV_SDA = 21;
char ENV_SCL = 22;
void setup() {
M5.begin();
M5.Display.setTextColor(TFT_BLACK);
M5.Display.setTextFont(&fonts::FreeMonoBoldOblique9pt7b);
M5.Display.clear(TFT_WHITE);
Serial.begin(115200);
if (!sht3x.begin(&Wire, SHT3X_I2C_ADDR, ENV_SDA, ENV_SCL, 400000U)) {
Serial.println("Couldn't find SHT3X\n");
M5.Display.printf("Couldn't find SHT3X");
while (1) delay(1);
}
else{
Serial.println("Find SHT3X\n");
M5.Display.printf("Find SHT3X\n");
}
if (!qmp.begin(&Wire, QMP6988_SLAVE_ADDRESS_L, 21, 22, 400000U)) {
Serial.println("Couldn't find QMP6988\n");
M5.Display.printf("Couldn't find QMP6988\n");
while (1) delay(1);
}
else{
Serial.println("Find QMP6988\n");
M5.Display.printf("Find QMP6988\n");
}
delay(2000);
M5.Display.clear(TFT_WHITE);
}
void loop() {
if (sht3x.update()) {
Serial.println("-----SHT3X-----");
Serial.print("Temperature: ");
Serial.print(sht3x.cTemp);
Serial.println(" degrees C");
Serial.print("Humidity: ");
Serial.print(sht3x.humidity);
Serial.println("% rH");
Serial.println("---------------\r\n");
M5.Display.fillRect(0, 0, 320, 120, TFT_WHITE);
M5.Display.setCursor(0, 20);
M5.Display.println("-----SHT3X-----");
M5.Display.print("Temperature: ");
M5.Display.print(sht3x.cTemp);
M5.Display.println(" degrees C");
M5.Display.print("Humidity: ");
M5.Display.print(sht3x.humidity);
M5.Display.println("% rH");
M5.Display.println("---------------\r\n");
}
if (qmp.update()) {
Serial.println("-----QMP6988-----");
Serial.print(F("Temperature: "));
Serial.print(qmp.cTemp);
Serial.println(" degrees C");
Serial.print(F("Pressure: "));
Serial.print(qmp.pressure);
Serial.println(" Pa");
Serial.print(F("Approx altitude: "));
Serial.print(qmp.altitude);
Serial.println(" m");
Serial.println("----------------\r\n");
M5.Display.fillRect(0, 120, 320, 120, TFT_WHITE);
M5.Display.setCursor(0, 120);
M5.Display.println("-----QMP6988-----");
M5.Display.print(F("Temperature: "));
M5.Display.print(qmp.cTemp);
M5.Display.println(" degrees C");
M5.Display.print(F("Pressure: "));
M5.Display.print(qmp.pressure);
M5.Display.println(" Pa");
M5.Display.print(F("Approx altitude: "));
M5.Display.print(qmp.altitude);
M5.Display.println(" m");
M5.Display.println("----------------\r\n");
}
delay(1000);
} このプログラムは、画面上に SHT3X と QMP6988 で取得した温度・湿度、気圧、標高の情報を1秒ごとに表示します。
Unit HUB
Unit HUBの主な役割は、一つのGroveポートを三つに拡張し、ユーザーが複数のI2Cデバイスを同時に接続できるようにすることです。内部のすべてのポートの信号は並列接続されており、異なるI2Cアドレスを通じて複数のI2Cデバイスを制御できます。
Unit IR
M5GOでUnit IRを制御し、赤外線NECコーディングの送受信を実現するサンプルプログラム。
サンプルプログラム
#include <IRremote.hpp>
#include <M5Unified.h>
#define IR_SEND_PIN 21 // IR送信機のGPIOピン
#define IR_RECEIVE_PIN 22 // IR受信機のGPIOピン
// デモパラメータ(NECプロトコル用)
uint16_t address = 0x0000; // デバイスの初期アドレス
uint8_t command = 0x55; // コマンドの初期値
uint8_t repeats = 0; // リピート送信回数
void setup() {
M5.begin(); // M5Stackデバイスを初期化
Serial.begin(115200); // シリアル通信(115200ボー)
delay(200); // シリアルポートの安定を待つ
// 表示設定
M5.Display.setTextColor(TFT_BLACK);
M5.Display.setTextFont(&fonts::FreeMonoBoldOblique9pt7b);
M5.Display.clear(TFT_WHITE);
M5.Display.setCursor(0,0);
M5.Display.printf("M5GO IRremote example");
Serial.println("M5GO IRremote example");
// IR通信初期化
IrReceiver.begin(IR_RECEIVE_PIN); // IR受信開始
IrSender.begin(DISABLE_LED_FEEDBACK); // LEDフィードバックなしで送信機初期化
IrSender.setSendPin(IR_SEND_PIN); // 送信ピンを指定
Serial.printf("IR Send Pin: %d, IR Recv Pin: %d\n", IR_SEND_PIN, IR_RECEIVE_PIN);
delay(500); // ハード安定待ち
}
void loop() {
// 1. NECプロトコルによる赤外線送信
Serial.printf("Send NEC: addr=0x%04x, cmd=0x%02x\n", address, command);
IrSender.sendNEC(address, command, repeats);
// 送信情報を画面に表示
M5.Display.fillRect(0, 20, 320, 90, TFT_WHITE); // 前の内容をクリア
M5.Display.setCursor(0, 40);
M5.Display.printf("Send NEC:\n addr=0x%04x\n cmd=0x%02x\n", address, command);
IrReceiver.restartAfterSend(); // 送信後に受信再開
// 2. 反射受信(至近距離テスト)を待機
delay(20); // 受信待ち
// 受信データのデコードを試みる
if (IrReceiver.decode()) {
// シリアルモニターに受信データを出力
Serial.printf("Received: protocol=%s, addr=0x%04x, cmd=0x%02x, raw=0x%08lx\n",
getProtocolString(IrReceiver.decodedIRData.protocol),
IrReceiver.decodedIRData.address,
IrReceiver.decodedIRData.command,
(unsigned long)IrReceiver.decodedIRData.decodedRawData);
// 受信データを画面表示
M5.Display.fillRect(0, 110, 320, 130, TFT_WHITE); // 前の内容をクリア
M5.Display.setCursor(0, 110);
M5.Display.printf("Received:\n protocol=%s\n addr=0x%04x\n cmd=0x%02x\n raw=0x%08lx\n",
getProtocolString(IrReceiver.decodedIRData.protocol),
IrReceiver.decodedIRData.address,
IrReceiver.decodedIRData.command,
(unsigned long)IrReceiver.decodedIRData.decodedRawData);
IrReceiver.resume(); // 次信号の受信を有効化
} else {
// 受信なしの場合
Serial.println("No IR received.");
M5.Display.fillRect(0, 110, 320, 130, TFT_WHITE); // 前内容クリア
M5.Display.setCursor(0, 110);
M5.Display.println("No IR received.");
}
// 次のサイクル用に送信パラメータを更新
address += 0x0001; // デバイスアドレスをインクリメント
command += 0x01; // コマンドコードをインクリメント
repeats = 0; // リピートフレームは無効(テストする場合は>0に)
delay(2000); // メインループディレイ(2秒)
} このプログラムはUnit IRで赤外線NEC信号を送受信し、NECコード関連の情報を画面に表示します。
Unit PIR
M5GOでUnit PIRを制御し、赤外線放射検出サンプルプログラム。
サンプルプログラム
#include <M5Unified.h>
char sensorPin = 36;
void setup()
{
M5.begin(); // M5GO初期化
M5.Display.setTextColor(TFT_BLACK);
M5.Display.setTextFont(&fonts::FreeMonoBoldOblique9pt7b);
M5.Display.clear(TFT_WHITE);
M5.Lcd.println("PIR example");
M5.Lcd.setCursor(0, 25); // カーソルを(0,25)に配置
M5.Lcd.println("Status: \nValue: ");
pinMode(sensorPin, INPUT); // sensorPinピンを入力モードに設定
}
void loop()
{
M5.Lcd.fillRect(90, 25, 180, 50, TFT_WHITE); // (90,25)に180×50の白い矩形を描く
if (digitalRead(sensorPin) == 1) { // pin sensorPinの値が1なら
M5.Lcd.setCursor(95, 25);
M5.Lcd.print("Sensing");
M5.Lcd.setCursor(95, 45);
M5.Lcd.print("1");
} else {
M5.Lcd.setCursor(95, 25);
M5.Lcd.print("Not Sensed");
M5.Lcd.setCursor(95, 45);
M5.Lcd.print("0");
}
delay(500);
} このプログラムはUnit PIRで赤外線放射を検知し、画面に検出状態を表示します。注意:この検出には一定の遅延があります。
Unit RGB
M5GOでUnit RGBを制御し、様々なライトのサンプルプログラム。
サンプルプログラム
#include <M5Unified.h>
#include <Adafruit_NeoPixel.h>
#define LED_PIN 32
#define NUM_LEDS 3
Adafruit_NeoPixel strip(NUM_LEDS, LED_PIN, NEO_GRB + NEO_KHZ800);
void setup() {
auto cfg = M5.config();
M5.begin(cfg);
M5.Display.setTextDatum(middle_center);
M5.Display.setTextFont(&fonts::Orbitron_Light_24);
M5.Display.setTextSize(1);
M5.Display.drawString("RGB LED Test", M5.Display.width() / 2, M5.Display.height() / 2);
strip.begin();
strip.show();
}
void loop() {
//RED
for(char i = 0; i <= NUM_LEDS; i++)
{strip.setPixelColor(i, strip.Color(255, 0, 0)); }
strip.show();
delay(1000);
//GREEN
for(char i = 0; i <= NUM_LEDS; i++)
{strip.setPixelColor(i, strip.Color(0, 255, 0)); }
strip.show();
delay(1000);
//BLUE
for(char i = 0; i <= NUM_LEDS; i++)
{strip.setPixelColor(i, strip.Color(0, 0, 255)); }
strip.show();
delay(1000);
} 動作例:
