

























Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Base
IoT
6. アプリケーション
AWS IoT Core
Hat CBack Driver Arduino 使用チュートリアル
1. 準備作業
- 環境の設定: Arduino IDE 入門チュートリアル を参照して IDE のインストールを完了し、使用する開発ボードに合わせたボードマネージャと必要なドライバライブラリをインストールしてください。
- 使用するドライバライブラリ:
- 使用するハードウェア製品:


2. サンプルプログラム
サンプルの説明
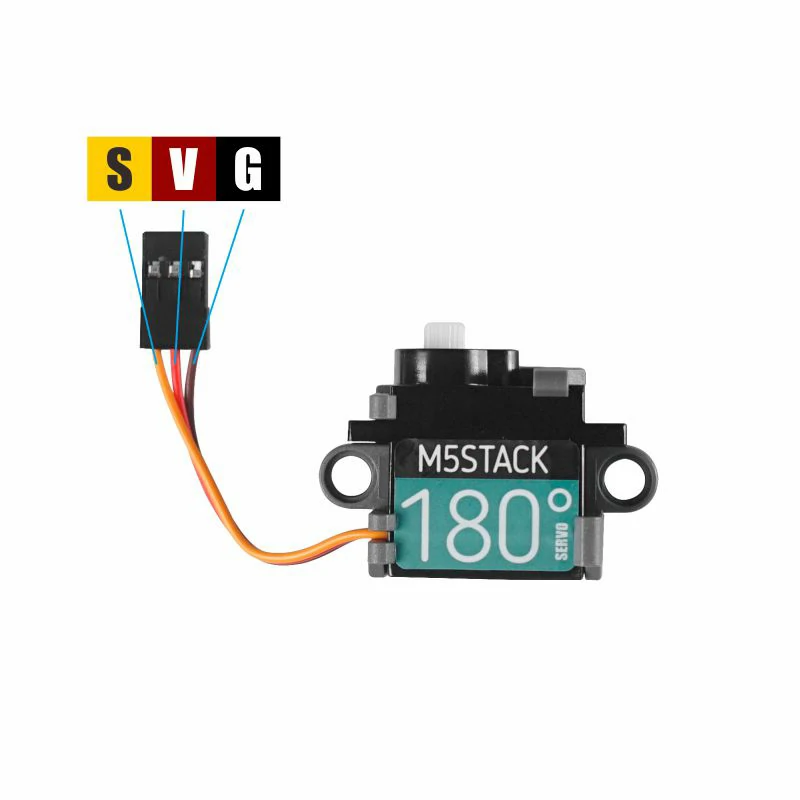
Hat CBack Driver は StickC シリーズのコントローラー向けに設計されたサーボドライバーボードで、4 チャンネルのサーボ制御と 2 つの Grove 拡張インターフェース (I2C + GPIO) を提供します。サーボへの電源供給は StickC コントローラーのバッテリーに直接接続され、十分な電力供給が可能となります。本サンプルでは、基本的なサーボ制御の駆動と、GPIO 拡張インターフェース (黒いインターフェース) を用いた基本的なデジタル信号出力およびアナログ信号入力を実演します。
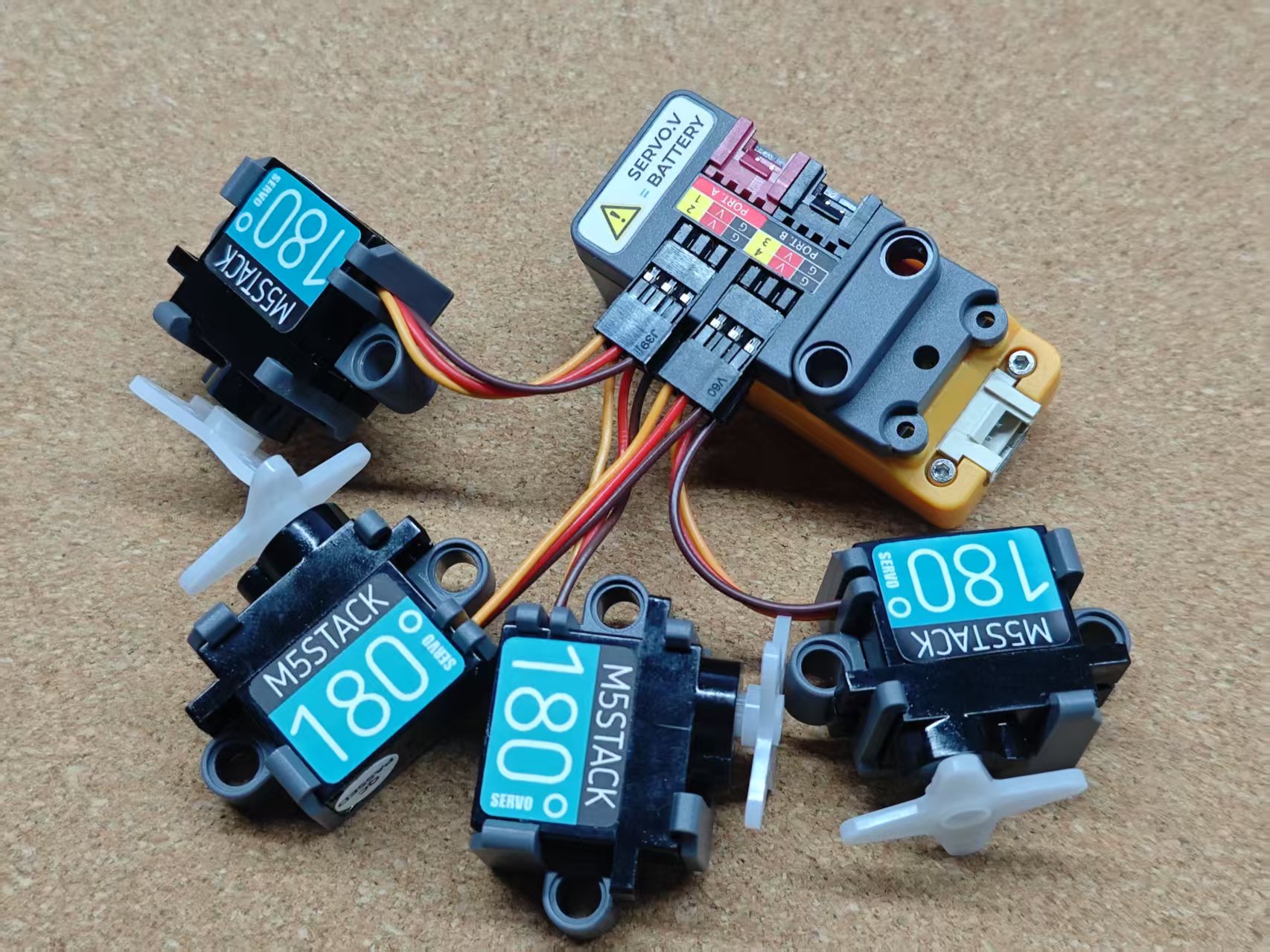
サーボの配線
完全なプログラム
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44
#include <M5Unified.h>
#include "M5HatCBackDriver.h"
M5HatCBackDriver driver;
void setup()
{
M5.begin();
Serial.begin(115200);
Wire.begin(0, 26);
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
M5.Display.setRotation(1);
while (!driver.begin(&Wire, M5_HAT_CBACK_DRIVER_I2C_ADDR)) {
M5.Display.fillScreen(YELLOW);
Serial.println("Hat CBack Driver Init Fail");
M5.Display.setCursor(0, 0);
M5.Display.println("Hat CBack Driver Init Fail");
delay(1000);
};
M5.Display.setCursor(0, 0);
M5.Display.fillScreen(GREEN);
Serial.println("Hat CBack Driver Init OK");
M5.Display.println("Hat CBack Driver Init OK");
M5.Display.println("Start Control Servo");
}
void loop()
{
for (int i = 0; i <= 3; i++) { // チャンネル 0-3
driver.setServoAngle(i, 0); // 0-180 度
// driver.setServoPulse(i,500); // 500-2500μs
delay(200);
}
for (int i = 0; i <= 3; i++) { // チャンネル 0-3
driver.setServoAngle(i, 180); // 0-180 度
// driver.setServoPulse(i,2500); // 500-2500μs
delay(200);
}
driver.digitalWritePortB(1);
delay(1000);
driver.digitalWritePortB(0);
Serial.print("PortB Analog Read: ");
Serial.println(driver.analogReadPortB());
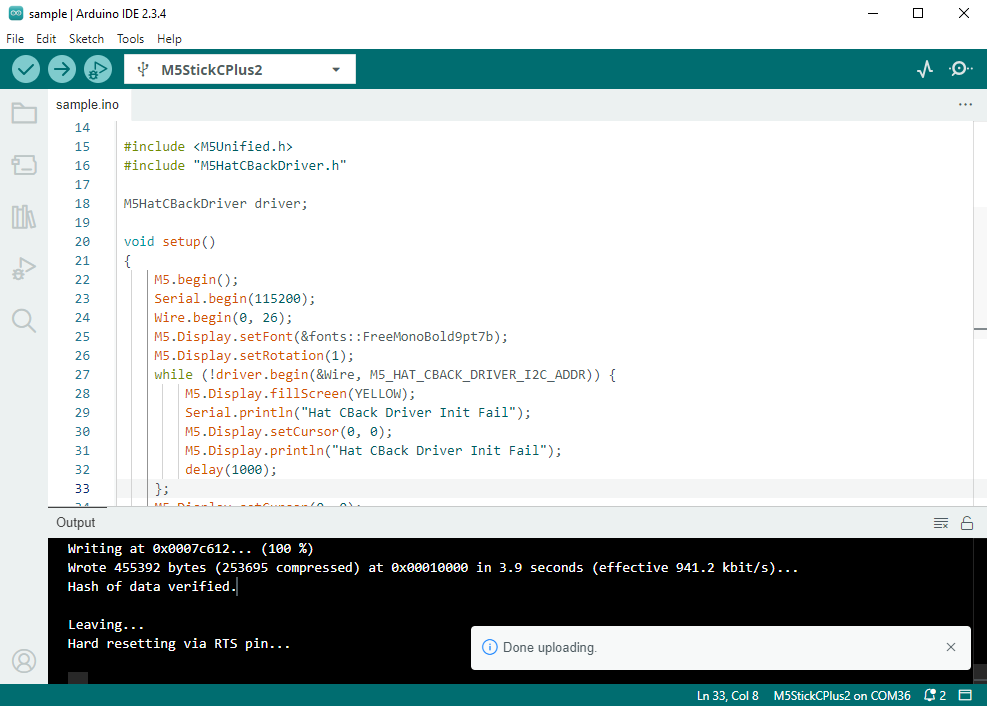
}3. コンパイルとアップロード
- ダウンロードモード: 各 Stick デバイスではプログラム書き込み前に対応するドライバをインストールする必要があります。使用するメイン制御デバイスによってドライバやインストール手順が異なる場合があるため、詳細は Arduino IDE 入門チュートリアル ページ下部のデバイスプログラムダウンロードチュートリアルリストを参照して、各デバイスに対応した操作方法を確認してください。
- デバイスのポートを選択し、Arduino IDE の左上にある「コンパイル & アップロード」ボタンをクリックして、プログラムのコンパイルおよびデバイスへのアップロードが完了するのを待ちます。
4. サーボ駆動
