Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Base
IoT
6. アプリケーション
AWS IoT Core
Unit RF433 Arduino 使用チュートリアル
1. 準備作業
環境設定: Arduino IDE 入門チュートリアルを参照して IDE のインストールを完了し、使用する開発ボードに応じたボード管理と必要なドライバライブラリをインストールしてください。
使用するドライバライブラリ:
Note
You need to download the latest library version from GitHub: RF433any - GitHub. Do not download from Arduino Library. (For any questions, please refer to this tutorial)
- 使用するハードウェア製品:




2. 注意事項
送受信セット
この RF433 装置はペアで使用する必要があり、送信モジュールとして Unit RF433T 1 台、受信モジュールとして Unit RF433R 1 台が必要です。
ピン互換性
各ホストデバイスのピン構成が異なるため、使用前に製品ドキュメントの RF433T ピン互換表と RF433R ピン互換表を参照し、実際のピン接続に応じてサンプルプログラムを修正してください。
3. サンプルプログラム
- 本チュートリアルでは、Basic v2.7 と Unit RF433T を送信端、CoreS3 と Unit RF433R を受信端として使用します。モジュールには DOUT と DIN の 2 種類の回路接続方式がありますので、実際の接続に応じてプログラム内のピン定義を修正してください。
3.1 RF433T 送信端
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80
#include <M5Unified.h>
#define TX_PIN 21
uint8_t data[5] = {0xAA, 0x55, 0x01, 0x02, 0x03};
void pulse(int high, int low) {
digitalWrite(TX_PIN, HIGH);
delayMicroseconds(high);
digitalWrite(TX_PIN, LOW);
delayMicroseconds(low);
}
void sendCorrected() {
noInterrupts();
digitalWrite(TX_PIN, LOW);
delayMicroseconds(10000);
pulse(5000, 2500);
pulse(2500, 1250);
pulse(8000, 4000);
for (int byte = 0; byte < 5; byte++) {
for (int bit = 7; bit >= 0; bit--) {
if (data[byte] & (1 << bit)) {
pulse(600, 300);
} else {
pulse(300, 600);
}
}
}
pulse(8000, 10000);
interrupts();
}
void setup() {
M5.begin();
Serial.begin(115200);
pinMode(TX_PIN, OUTPUT);
digitalWrite(TX_PIN, LOW);
M5.Display.fillRect(0, 0, 320, 240, WHITE);
M5.Display.setTextColor(BLACK);
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.setCursor(0, 0);
M5.Display.println("Corrected RF433T");
M5.Display.println("Click Btn A to send");
Serial.println("Corrected RF433 Transmitter Ready");
}
void loop() {
M5.update();
if (M5.BtnA.wasPressed()) {
Serial.println("SEND CORRECTED");
sendCorrected();
delay(100);
Serial.print("Sent: ");
for (int i = 0; i < 5; i++) {
Serial.printf("%02X ", data[i]);
}
Serial.println();
M5.Display.print("Sent: ");
for (int i = 0; i < 5; i++) {
M5.Display.printf("%02X ", data[i]);
}
M5.Display.println("");
}
delay(10);
}3.2 RF433R 受信端
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58
#include "RF433any.h"
#include <M5Unified.h>
#define PIN_RFINPUT 1
void setup() {
M5.begin();
M5.Display.fillRect(0, 0, 320, 240, WHITE);
M5.Display.setTextColor(BLACK);
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.setCursor(0, 0);
M5.Display.println("RF433 Receiver");
pinMode(PIN_RFINPUT, INPUT);
Serial.begin(115200);
Serial.println("Waiting for signal\n");
M5.Display.println("Waiting for signal");
}
Track track(PIN_RFINPUT);
void loop() {
track.treset();
while (!track.do_events())
delay(1);
Decoder *pdec0 = track.get_data(
RF433ANY_FD_DECODED | RF433ANY_FD_DEDUP | RF433ANY_FD_NO_ERROR
);
for (Decoder *pdec = pdec0; pdec != nullptr; pdec = pdec->get_next()) {
Serial.print("Received ");
M5.Display.println("Received \r\n");
Serial.print(pdec->get_nb_bits());
M5.Display.print(pdec->get_nb_bits());
Serial.print(" bits (x");
M5.Display.println(" bits (x");
Serial.print(pdec->get_repeats() + 1);
M5.Display.print(pdec->get_repeats() + 1);
Serial.print("): ");
M5.Display.println(": ");
char *buf = pdec->get_pdata()->to_str();
// DEFENSIVE PROGRAMMING
// The option RF433ANY_FD_DECODED above guarantees there's always
// something decoded. Test done though, just in case.
if (buf) {
Serial.println(buf);
M5.Display.println(buf);
free(buf);
}
}
delete pdec0;
delay(2000);
M5.Display.fillRect(0, 40, 320, 220, WHITE);
M5.Display.setCursor(0, 40);
}
// vim: ts=4:sw=4:tw=80:et
4. コンパイルとアップロード
ダウンロードモード:デバイスによってプログラム書き込み前にダウンロードモードに入る必要があります。この手順はメインコントローラデバイスによって異なる場合があります。詳細はArduino IDE 入門チュートリアルページ下部のデバイスプログラミングチュートリアルリストを参照してください。
CoreS3 の場合:リセットボタンを約 2 秒間長押しし、内部の緑色 LED が点灯したら離します。これでデバイスはダウンロードモードに入り、書き込みを待機します。
.gif)
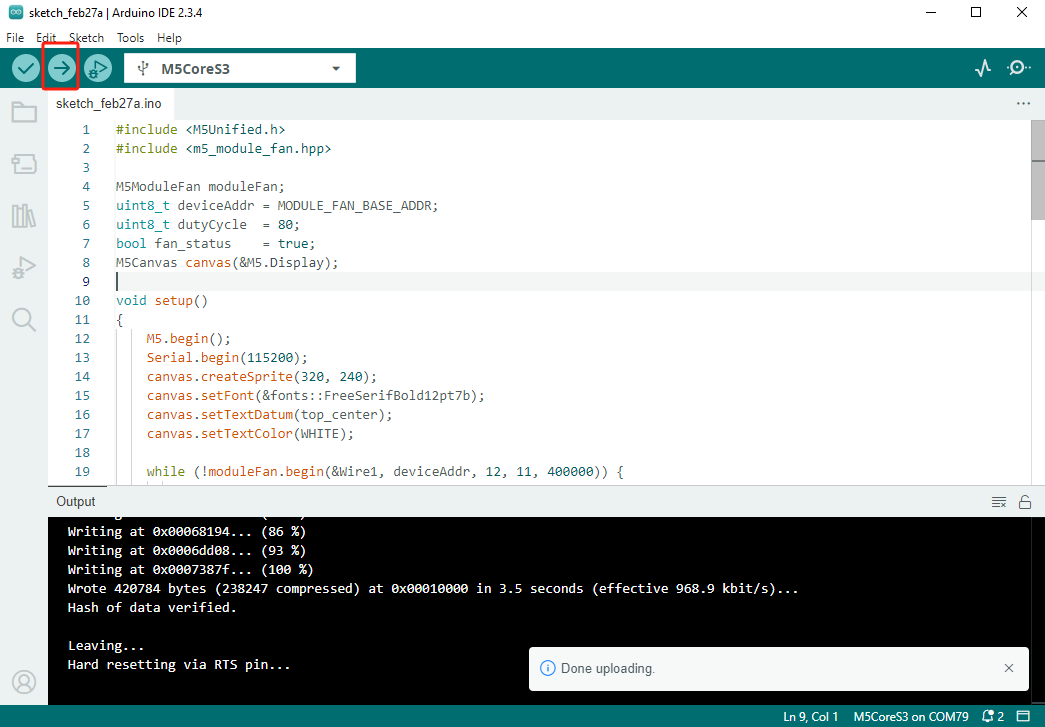
- デバイスポートを選択し、Arduino IDE 左上のコンパイル/アップロードボタンをクリックします。プログラムのコンパイルが完了し、デバイスにアップロードされるまで待機します。
5. 通信テスト

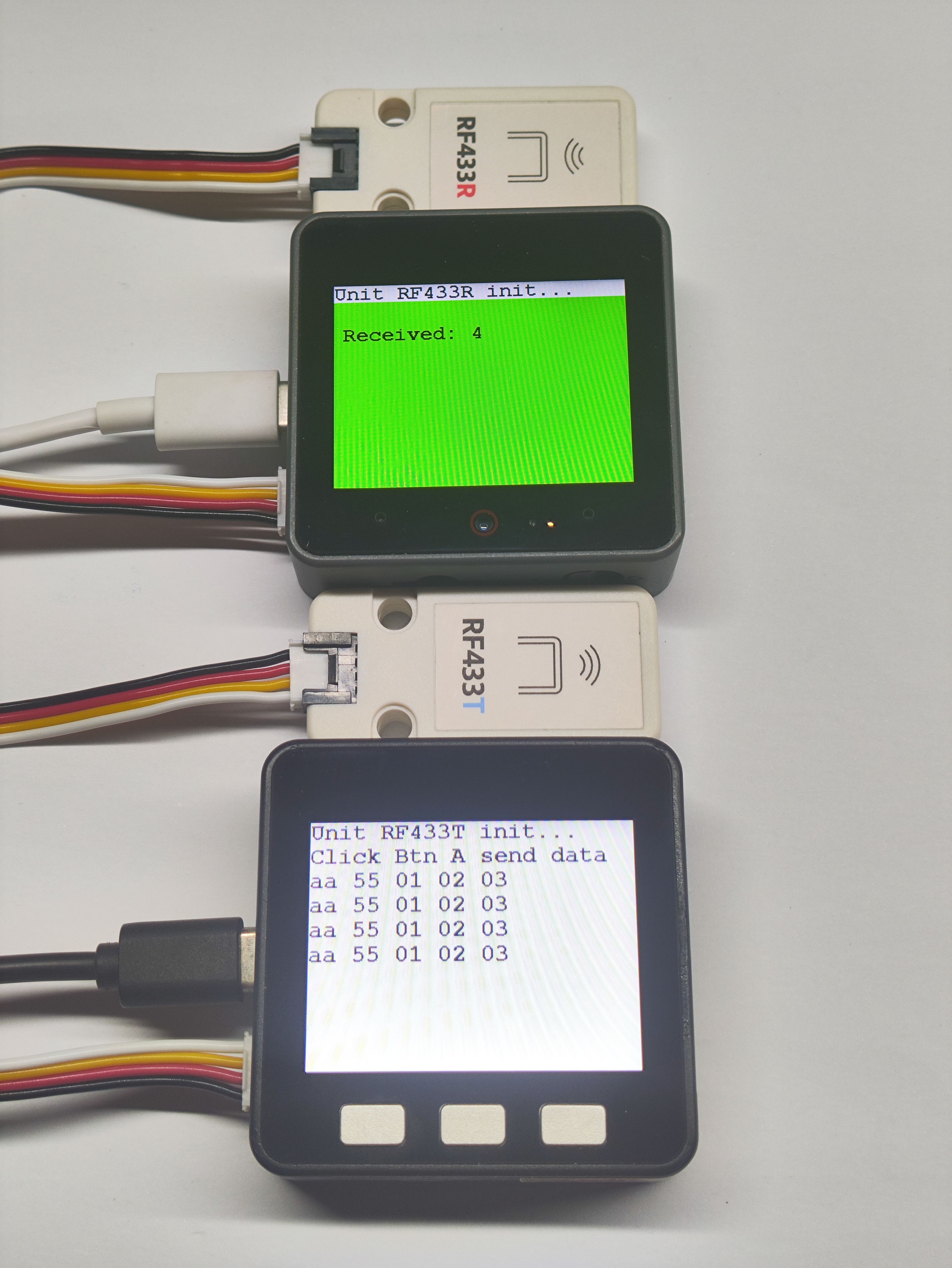
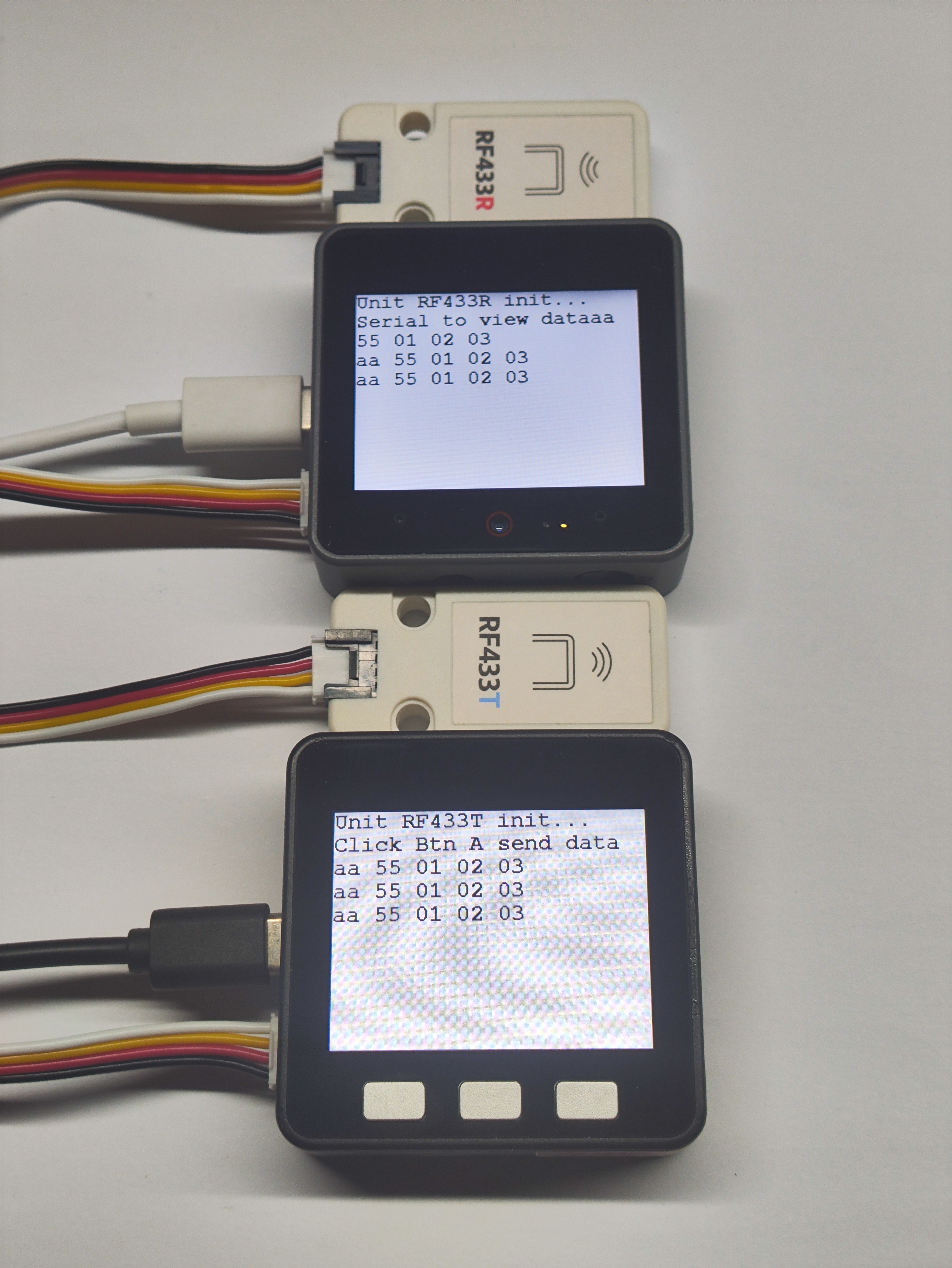
- Basic v2.7 のボタン A を押すと、RF433T 経由でデータパケットが送信されます。CoreS3 が RF433R 経由でデータパケットを受信した場合、シリアルポートに出力され、画面にリアルタイムで表示されます。
- 2 台のデバイス間で 4 回の通信が成功すると、CoreS3 の画面が緑色に変わり、成功を示します。