

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
Unit ACSSR/DCSSR Arduino 使用チュートリアル
1. 準備作業
1. 環境構築: Arduino IDE クイックスタートを参考に IDE をインストールし、使用する開発ボードに対応するボードマネージャーと必要なドライバライブラリをインストールしてください。
2. 使用するドライバライブラリ:
3. 使用するハードウェア製品:


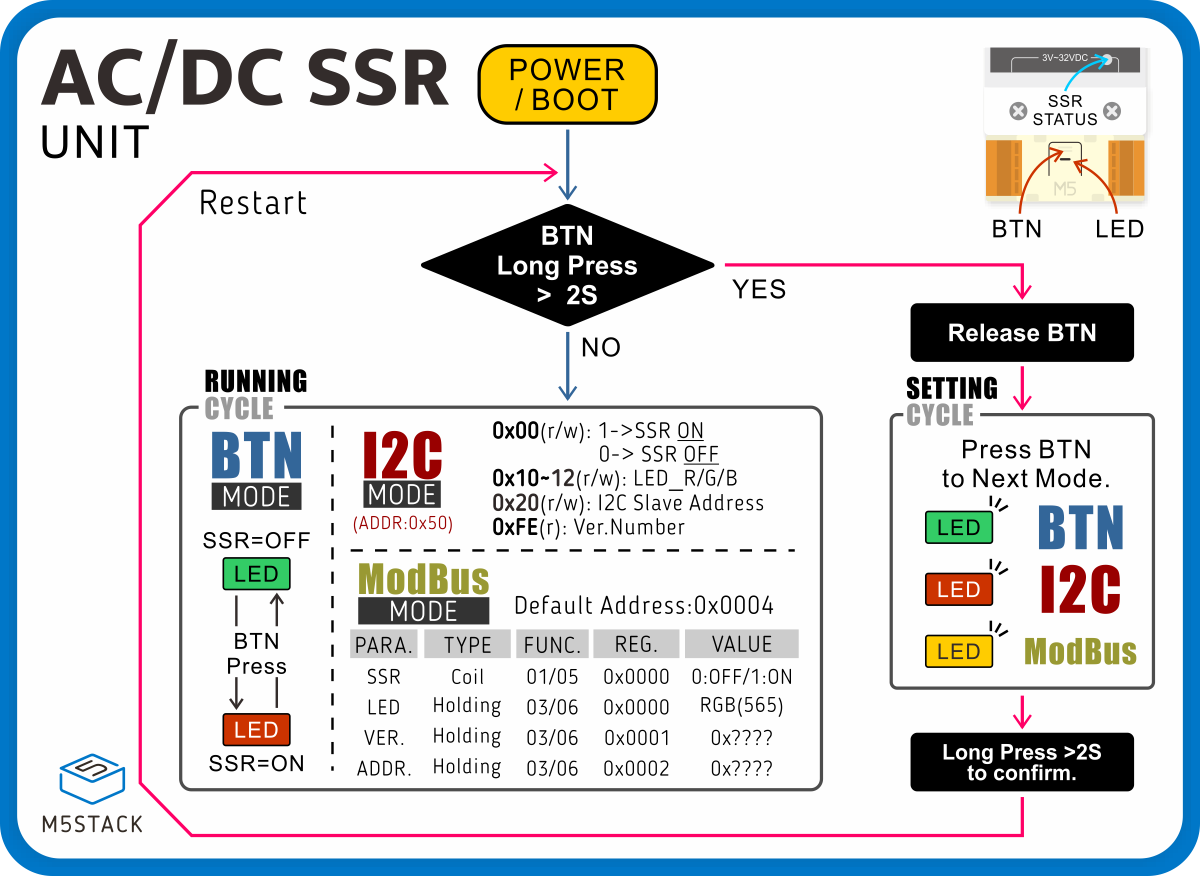
2. 動作モード
動作モード設定
使用前に以下の説明フローチャートに従って動作モードを設定してください
- 1. デバイスの電源を切った状態で、中央のボタンを長押しします。
- 2. デバイスに電源を入れると、RGB LED が高速点滅し、モード設定状態に入ります。
- 3. ボタンを 1 回押してモードを切り替えます:
- 緑:ボタン手動モード。動作中は中央ボタンでスイッチを制御。
- 赤:I2C 通信モード。動作中は HY2.0-4P Grove 端子から I2C バス接続で制御。
- 黄:Modbus 通信モード。動作中は両端の HT3.96-4P 端子から Modbus バス接続で制御。
- 4. 長押しで現在のモードを選択保存します。
- 負荷接続例

3. I2C モード制御
デバイスを I2C 動作モードに設定後、HY2.0-4P Grove 端子から I2C バスに接続して制御します。本例では CoreS3 の PORT.A 端子で通信を行っています。他のコントローラを使用する場合は、接続ピンに応じてプログラムを修正してください。
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
#include "M5Unified.h"
#include "M5_ACSSR.h"
M5_ACSSR SSR;
void printStatus();
void setup()
{
M5.begin();
Serial.begin(115200);
while (!SSR.begin(&Wire, 2, 1, ACSSR_DEFAULT_ADDR)) {
M5.Display.println("ACSSR I2C INIT ERROR");
Serial.println("ACSSR I2C INIT ERROR");
delay(1000);
}
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
}
void loop()
{
SSR.on();
SSR.setLEDColor(0xff0000);
printStatus();
delay(1000);
SSR.off();
SSR.setLEDColor(0x00ff00);
printStatus();
delay(1000);
}
void printStatus()
{
int relay = SSR.status();
int color = SSR.getLEDColor();
int version = SSR.getVersion();
M5.Display.clear();
M5.Display.setCursor(0, 0);
M5.Display.println("I2C Mode Control");
if (relay != -1) {
Serial.printf("Relay: %s\n", relay ? "ON" : "OFF");
M5.Display.printf("Relay: %s\n", relay ? "ON" : "OFF");
}
if (color != -1) {
Serial.printf("LED Color: 0x%04X\n", color);
M5.Display.printf("LED Color: 0x%04X\n", color);
}
if (version != -1) {
Serial.printf("FW Version: 0x%04X\n", version);
M5.Display.printf("FW Version: 0x%04X\n", version);
}
}
4. Modbus モード制御
デバイスを Modbus 動作モードに設定後、両端の HT3.96-4P 端子から Modbus バスに接続して制御します。本例では CoreS3 PORT.A と Unit RS485-ISO を使用し、RS485 通信を行っています。
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113
#include "M5Unified.h"
#include "M5_ACSSR.h"
#include <ArduinoModbus.h>
#include <ArduinoRS485.h>
RS485Class RS485(Serial2, 1, 2, -1, -1);
uint8_t slave_id = 0;
void relayOn();
void relayOff();
void setLedColor(uint16_t color);
int getRelayStatus();
int getLedColor();
int getFirmwareVersion();
void printStatus();
void setup()
{
M5.begin();
Serial.begin(115200);
delay(2000);
Wire.end();
ModbusRTUClient.begin(115200, SERIAL_8N1);
slave_id = ACSSR_DEFAULT_SLAVE_ID;
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
}
void loop()
{
relayOn();
setLedColor(0xF800); // RED
printStatus();
delay(1000);
relayOff();
setLedColor(0x07E0); // GREEN
printStatus();
delay(1000);
}
void relayOn()
{
ModbusRTUClient.coilWrite(slave_id, ACSSR_RELAY_COIL_ADDR, 0xFF);
}
void relayOff()
{
ModbusRTUClient.coilWrite(slave_id, ACSSR_RELAY_COIL_ADDR, 0x00);
}
void setLedColor(uint16_t color)
{
ModbusRTUClient.holdingRegisterWrite(slave_id, ACSSR_LED_HOLDING_ADDR, color);
}
int getRelayStatus()
{
if (ModbusRTUClient.requestFrom(slave_id, COILS, ACSSR_RELAY_COIL_ADDR, 1)) {
while (ModbusRTUClient.available()) {
return ModbusRTUClient.read();
}
}
return -1;
}
int getLedColor()
{
if (ModbusRTUClient.requestFrom(slave_id, HOLDING_REGISTERS, ACSSR_LED_HOLDING_ADDR, 1)) {
while (ModbusRTUClient.available()) {
return ModbusRTUClient.read();
}
}
return -1;
}
int getFirmwareVersion()
{
if (ModbusRTUClient.requestFrom(slave_id, HOLDING_REGISTERS, ACSSR_VERSION_HOLDING_ADDR, 1)) {
while (ModbusRTUClient.available()) {
return ModbusRTUClient.read();
}
}
return -1;
}
void printStatus()
{
int relay = getRelayStatus();
int color = getLedColor();
int version = getFirmwareVersion();
M5.Display.clear();
M5.Display.setCursor(0, 0);
M5.Display.println("Modbus Mode Control");
if (relay != -1) {
Serial.printf("Relay: %s\n", relay ? "ON" : "OFF");
M5.Display.printf("Relay: %s\n", relay ? "ON" : "OFF");
}
if (color != -1) {
Serial.printf("LED Color: 0x%04X\n", color);
M5.Display.printf("LED Color: 0x%04X\n", color);
}
if (version != -1) {
Serial.printf("FW Version: 0x%04X\n", version);
M5.Display.printf("FW Version: 0x%04X\n", version);
}
}
Page Tools