


Arduino Quick Start
2. Devices & Examples
3. M5Unified
4. M5GFX
5. Extensions
Unit
Base
IoT
Accessories
Chain Encoder Tutorial
1.Preparation
- Environment Setup: Refer to the Arduino IDE Getting Started Guide to complete the IDE installation. Then install the corresponding board package and required driver libraries according to the development board you are using.
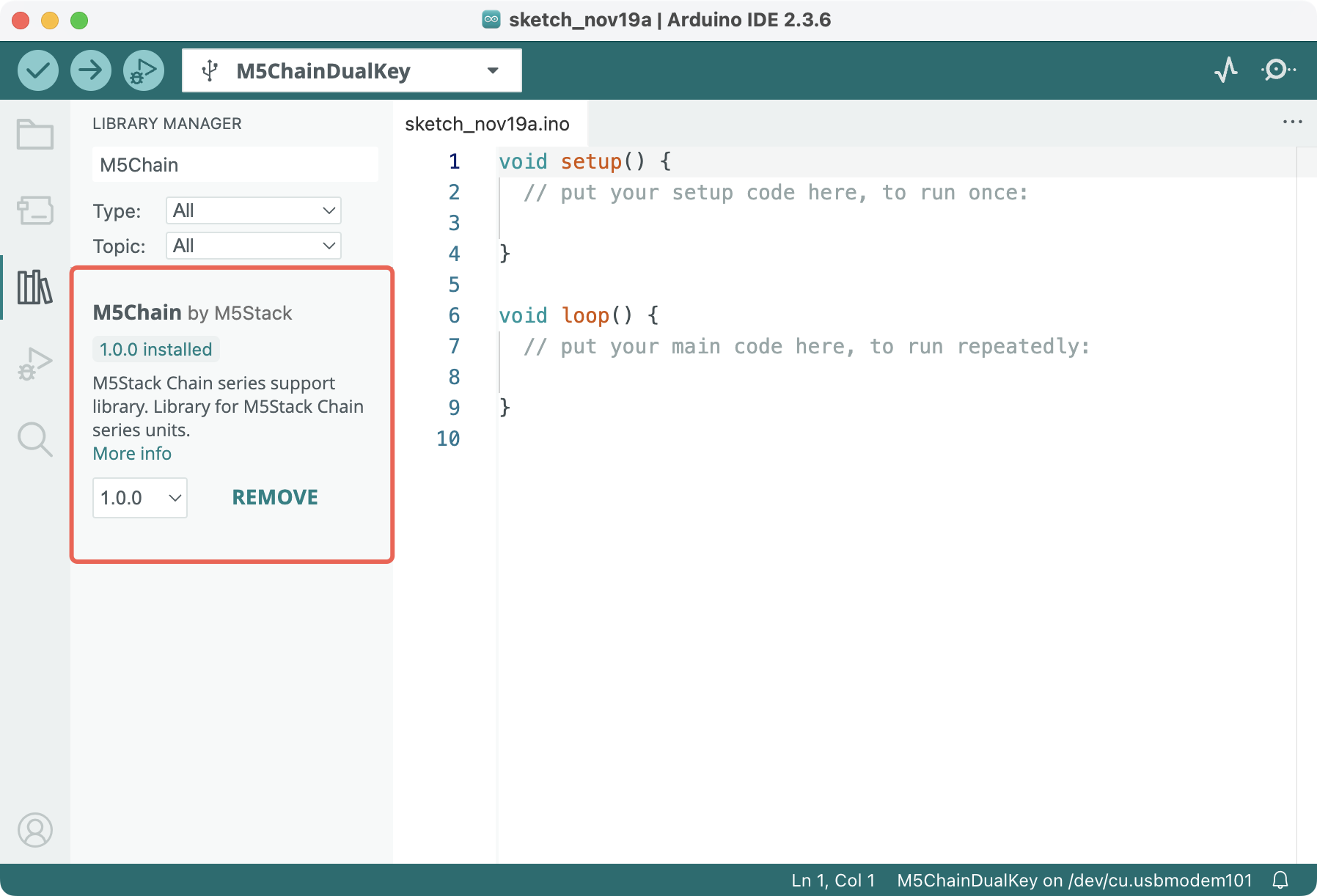
- Required Driver Library:
- Required Hardware Products:
- Chain DualKey
- Chain series connectors such as Chain Bridge or Chain Return
- Chain Encoder


2.Example Program
Build Requirements
M5Stack Board Manager Version >= 3.2.4
M5Chain Library Version >= 1.0.0
M5Chain Library Version >= 1.0.0
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81
#include "M5Chain.h"
#define RXD_PIN GPIO_NUM_5 // 47 for the other side of Chain DualKey
#define TXD_PIN GPIO_NUM_6 // 48 for the other side of Chain DualKey
Chain M5Chain;
device_list_t *device_list = NULL;
uint16_t device_count = 0;
uint8_t opr_status = 0;
int16_t encoder_value;
int16_t encoder_incre;
uint8_t button_status;
chain_button_press_type_t button_press_type;
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("===========================");
Serial.println("M5Stack Chain Encoder Test");
M5Chain.begin(&Serial2, 115200, RXD_PIN, TXD_PIN);
while (!M5Chain.isDeviceConnected()) {
Serial.println("No device connected");
delay(1000);
}
M5Chain.getDeviceNum(&device_count);
device_list = (device_list_t *)malloc(sizeof(device_list_t));
device_list->count = device_count;
device_list->devices = (device_info_t *)malloc(sizeof(device_info_t) * device_count);
M5Chain.getDeviceList(device_list);
if (device_list->devices[0].device_type == CHAIN_ENCODER_TYPE_CODE) {
Serial.println("ID[1] is Chain Encoder\n");
delay(1000);
} else {
Serial.println("ID[1] is NOT Chain Encoder\n");
return;
}
// Device ID, double click interval (100MS/200MS/.../900MS/1000MS), long press interval (3S/4S/.../9S/10S), operation status pointer
M5Chain.setEncoderButtonTriggerInterval(1, BUTTON_DOUBLE_CLICK_TIME_500MS, BUTTON_LONG_PRESS_TIME_5S, &opr_status);
Serial.println("Set double and long press intervals");
// Device ID, increment direction (AB = clockwise, BA = counterclockwise), operation status pointer
M5Chain.setEncoderABDirect(1, ENCODER_AB, &opr_status);
Serial.println("Set increment direction\n");
delay(1000);
}
void loop() {
M5Chain.getEncoderValue(1, &encoder_value); // Device ID
Serial.print("encoder_value:");
Serial.println(encoder_value);
M5Chain.getEncoderIncValue(1, &encoder_incre); // Device ID
Serial.print("encoder_incre:");
Serial.println(encoder_incre);
M5Chain.getEncoderButtonStatus(1, &button_status); // Device ID
Serial.print("button_status:");
Serial.println(button_status);
while (M5Chain.getEncoderButtonPressStatus(1, &button_press_type)) { // Device ID
switch (button_press_type) {
case CHAIN_BUTTON_PRESS_SINGLE:
Serial.println("Single pressed");
M5Chain.resetEncoderValue(1, &opr_status); // Device ID
break;
case CHAIN_BUTTON_PRESS_DOUBLE:
Serial.println("Double pressed");
break;
case CHAIN_BUTTON_PRESS_LONG:
Serial.println("Long pressed");
break;
}
}
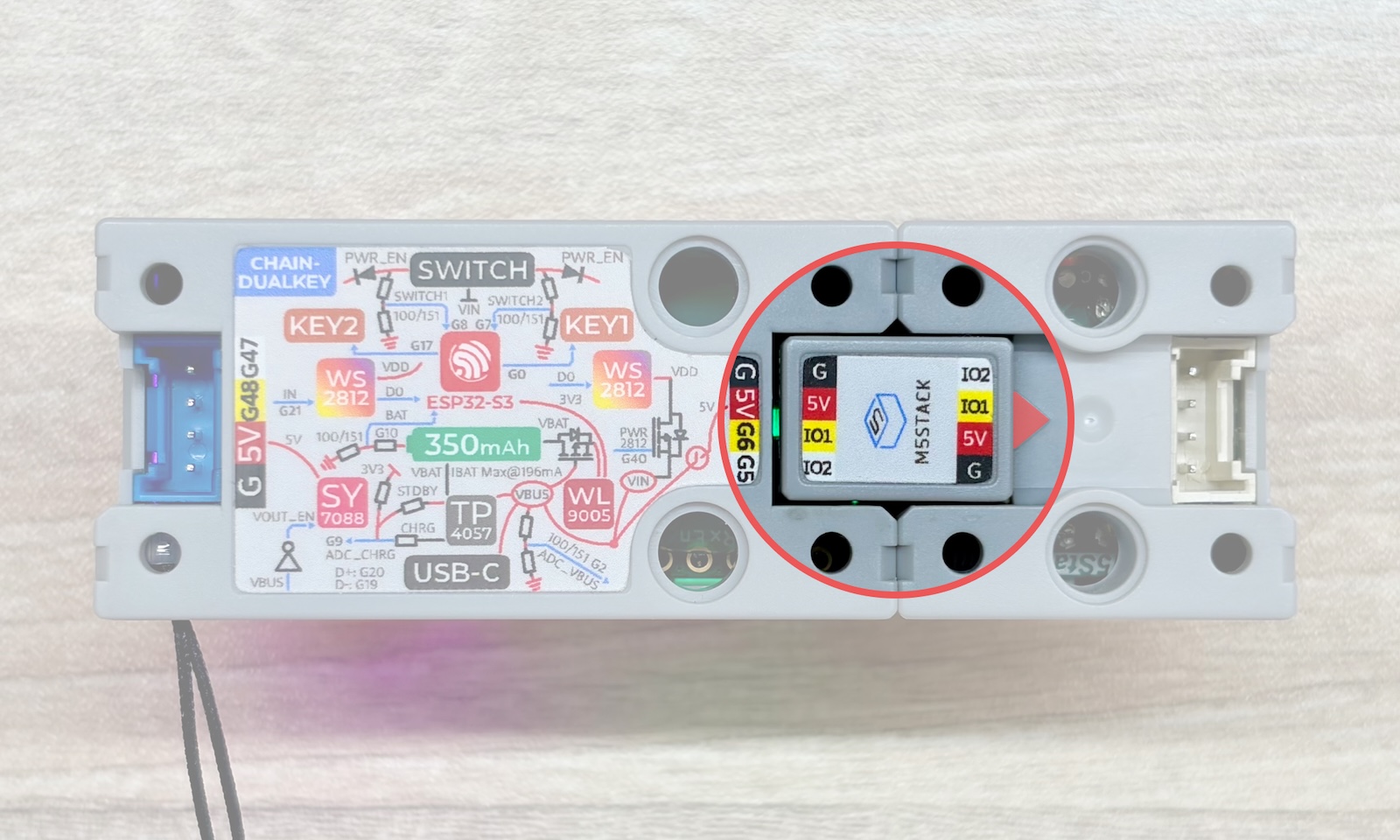
}Use the Chain Bridge connector to link the main controller Chain DualKey with Chain Encoder. When connecting, make sure the direction is correct: the triangular arrow should point outward from the main controller Chain DualKey, as shown below:
Compile and upload the above program to the device. Click the button in the upper-right corner of Arduino IDE to open Serial Monitor and Serial Plotter. Rotate the knob on Chain Encoder and you will see the following information:
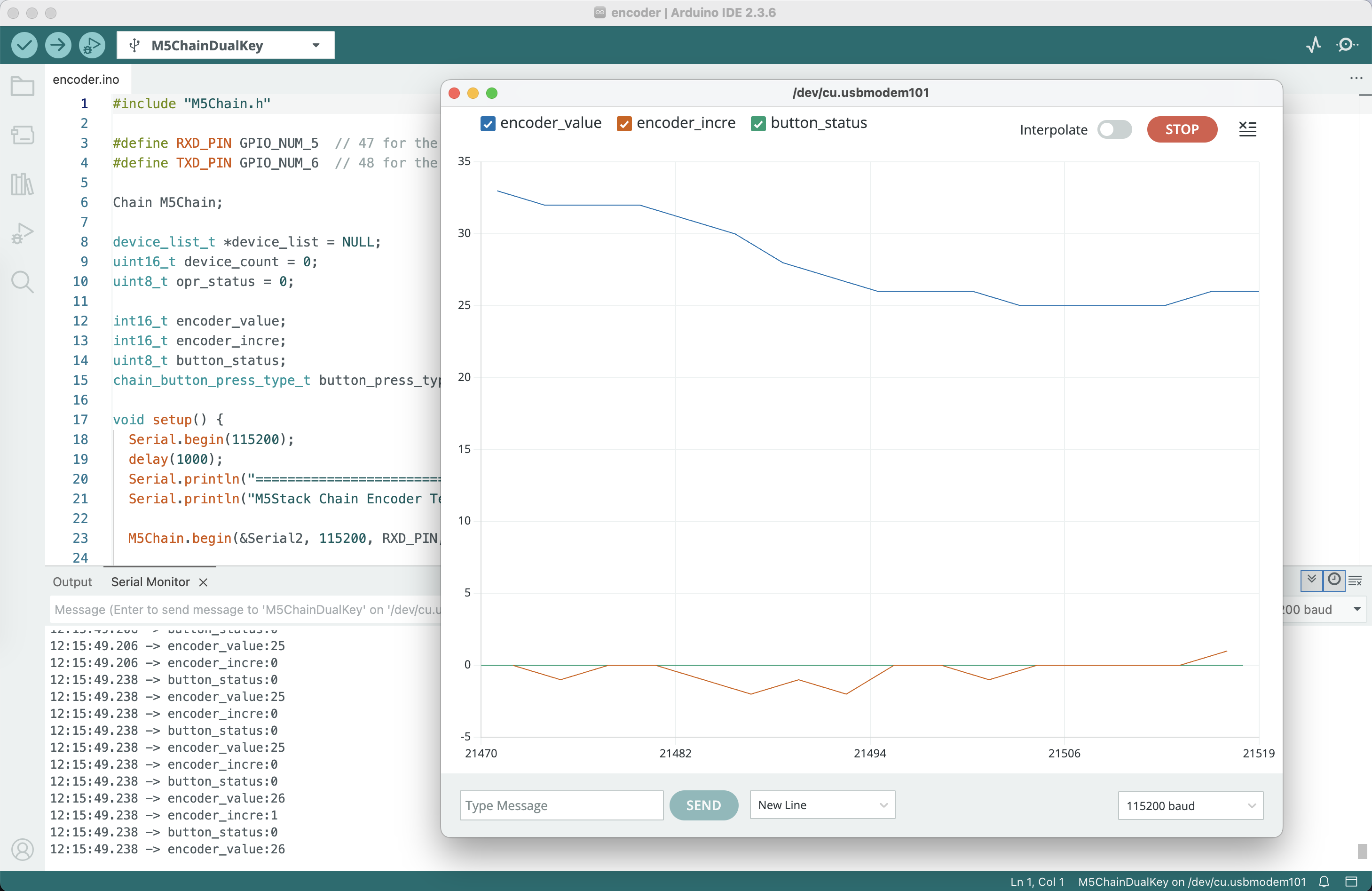
encoder_value: current value of the knobencoder_incre: change amount of the knob in this stepbutton_status: whether the knob is pressed- Single-click, double-click, and long-press events of the knob
- In this example, a single click on the knob resets
encoder_valueto 0 - At the end of the
setupfunction, you can configure the trigger time for double-click and long-press, as well as the direction in which the knob value changes (clockwise to increase / counterclockwise to increase)