

Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
Atomic Stepmotor Base Arduino 使用教程
1. 准备工作
环境配置: 参考 Arduino IDE 上手教程完成 IDE 安装,并根据实际使用的开发板安装对应的板管理,与需要的驱动库。
使用到的驱动库:
使用到的硬件产品:

2. 步进电机控制知识介绍
步进电机是一种将电脉冲转换为角位移的电机。每接收到一个脉冲,电机轴就会按固定的角度旋转。这种特性使得步进电机非常适合需要精确位置控制的应用场景,如打印机、数控机床和机器人等。
1. 结构组成:
- 定子(Stator):由多个绕组组成,通电后产生磁场。
- 转子(Rotor):通常为带有齿槽的铁芯,受定子磁场作用而旋转。
2. 工作原理:
- 通过按特定顺序给 A、B 相绕组通电,产生旋转磁场,吸引转子磁极随之转动。
- 1 个控制脉冲对应 1 次绕组通电状态切换,转子完成 1 步角位移;脉冲频率决定转速,脉冲数量决定总位移。
3. 主要参数:
- 相数(Phases):步进电机的绕组数量,常见的有两相、三相、四相、五相步进电机。
- 全步数量(Number of Full Steps):电机旋转一圈所需的基础脉冲数,由硬件结构决定。两相步进电机常见为 200 步 / 圈,即每接收 200 个全步脉冲,转子旋转 360°。
- 步距角(Step Angle):指电机每接收一个脉冲时轴旋转的角度,公式为
步距角 = 360°/ 全步数量,两相 200 步电机的全步步距角 = 360° ÷ 200 = 1.8°。 - 微步细分(Microstepping):通过控制电流大小将 1 个全步拆分为多个更小的 “微步”,可以提升定位精度和平滑度。常见细分有 1/2、1/4、1/8、1/16 等。
- 转速(Speed):步进电机的转速通常以每分钟转圈数(RPM)表示,受脉冲频率和负载影响,与脉冲频率正相关,公式为
转速 = 脉冲频率 / 全步数量 × 60。 - 保持力矩(Holding Torque):当电机静止时,能够抵抗外力使其转动的最大力矩,两相电机常见范围为 0.1 ~ 5N・m。
3. 案例程序
- 本教程中使用的主控设备为 AtomS3R ,搭配 Atomic Stepmotor Base。本模块采用串口方式通讯,根据实际的电路连接修改程序中的引脚定义,设备连接后对应的串口引脚为
G5 (EN)、G6 (STEP)、G7 (DIR)。
3.1 引脚拨码开关
Atomic Stepmotor Base 可以通过调节拨码开关设置步进电机的细分模式,拨码开关共有 4 个开关位,M2、M1、M0、DECAY 分别对应芯片 DRV8825 的 MODE2、MODE1、MODE0 、 DECAY 引脚。其中,M2、M1、M0 用于设置步进电机的细分模式,具体设置如下表所示;
DECAY 用于设置电流衰减模式,更多详细信息请参考 DRV8825 数据手册。
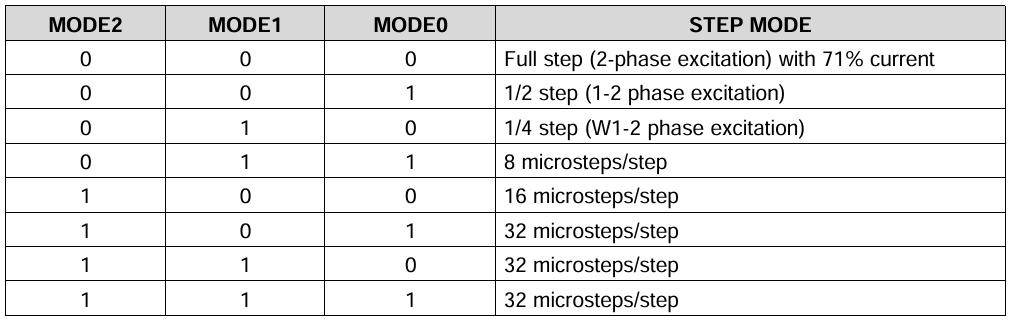
下方例程中通过变量 step_division 设置了步进电机的细分模式,请根据拨码开关的实际设置修改该变量的值;本次实际设置中,引脚拨码开关切换到了 1/32 微步模式,详见下图。

3.2 示例代码
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186
#include "M5Unified.h"
#include "M5GFX.h"
// Stepper motor configuration parameters
int step_division = 32; // Motor microstepping division factor
int number_of_steps = 200; // Number of steps per full revolution of the motor
int en_pin = 5; // Motor driver enable pin
int step_pin = 6; // Motor step control pin
int dir_pin = 7; // Motor direction control pin
// Timing variables for step control
unsigned long step_interval = 10000; // Microsecond interval between step pulses
unsigned long last_step_time = 0; // Timestamp of the last step pulse
unsigned long target_step_time1 = 0; // Target time for step pin HIGH state
unsigned long target_step_time2 = 0; // Target time for step pin LOW state
void motor_setSpeed(float rpm); // Set motor rotation speed (revolutions per minute)
void motor_powerEnable(bool ena); // Enable/disable motor driver
void motor_setDirection(long steps_to_move); // Set rotation direction based on step count
void motor_move(); // Generate a single step pulse
void motor_moveInterval(unsigned long target_delay); // Control step pulse timing
void motor_dynamicMove(int s1, int s2); // Step with dynamic acceleration/deceleration
void motor_step(long steps_to_move); // Move specified steps without acceleration
void motor_step_accdec(long steps_to_move, long steps_acc, long steps_dec); // Move with acceleration/deceleration
void setup() {
M5.begin();
M5.Lcd.setFont(&fonts::FreeMonoBoldOblique9pt7b); // Set display font
M5.Lcd.drawCenterString("Motor", 64, 64); // Display title at center
pinMode(en_pin, OUTPUT);
pinMode(dir_pin, OUTPUT);
pinMode(step_pin, OUTPUT);
motor_setSpeed(0); // Set initial speed to 0
motor_powerEnable(true); // Enable motor driver
delay(1600); // Short delay for initialization
}
void loop() {
M5.update();
if (M5.BtnA.wasPressed()) {
motor_setSpeed(300); // Set motor speed to 300 RPM
motor_step(1200); // Rotate 1200 steps clockwise
motor_step(-1200); // Rotate 1200 steps counter-clockwise
}
}
// ---- Function Definitions ----
/**
* Set motor rotation speed in revolutions per minute (RPM)
* Calculates step interval based on RPM, steps per revolution, and microstepping
* @param rpm Target rotation speed in revolutions per minute
*/
void motor_setSpeed(float rpm) {
// Calculate microsecond interval between steps:
// 60,000,000 microseconds/minute ÷ (steps/rev × RPM × microsteps)
step_interval = 60000000L / (number_of_steps * rpm * step_division);
}
/**
* Enable or disable the motor driver
* @param ena True to enable motor (driver active), false to disable
*/
void motor_powerEnable(bool ena) {
digitalWrite(en_pin, ena ? LOW : HIGH); // Typically, LOW enables most drivers
}
/**
* Set motor rotation direction based on step count sign
* @param steps_to_move Positive for clockwise, negative for counter-clockwise
*/
void motor_setDirection(long steps_to_move) {
if (steps_to_move < 0) {
digitalWrite(dir_pin, HIGH); // Set direction pin for counter-clockwise
} else {
digitalWrite(dir_pin, LOW); // Set direction pin for clockwise
}
}
/**
* Generate a single step pulse (HIGH then LOW) with proper timing
*/
void motor_move() {
digitalWrite(step_pin, HIGH); // Set step pin HIGH to trigger step
motor_moveInterval(step_interval); // Maintain HIGH state and then transition to LOW
}
/**
* Control timing for step pin state transitions
* Ensures proper duration for HIGH and LOW states of the step pulse
* @param target_delay Total duration of one step cycle (HIGH + LOW) in microseconds
*/
void motor_moveInterval(unsigned long target_delay) {
// Calculate target times for state transitions
target_step_time1 = last_step_time + (target_delay / 2); // Midpoint (HIGH to LOW)
target_step_time2 = last_step_time + target_delay; // End of cycle (LOW to next step)
// Wait for HIGH state duration
if (target_step_time1 >= last_step_time) {
while (micros() < target_step_time1) {} // Handle normal time progression
} else {
while ((long)(micros()) < (long)target_step_time1) {} // Handle micros() rollover
}
digitalWrite(step_pin, LOW); // Set step pin LOW after half the interval
// Wait for remaining LOW state duration
if (target_step_time2 >= last_step_time) {
while (micros() < target_step_time2) {} // Handle normal time progression
} else {
while ((long)(micros()) < (long)target_step_time2) {} // Handle micros() rollover
}
last_step_time = micros(); // Update last step timestamp
}
/**
* Generate a step with dynamic speed adjustment for acceleration/deceleration
* @param s1 Current step in acceleration/deceleration phase
* @param s2 Total steps in acceleration/deceleration phase
*/
void motor_dynamicMove(int s1, int s2) {
digitalWrite(step_pin, HIGH); // Start step pulse
// Calculate speed ratio using polynomial for smooth acceleration/deceleration
double r1 = (double)s1 / (double)s2;
double r2 = 0.1 + 0.2*r1 + 2.2*r1*r1 - 1.5*r1*r1*r1;
// Adjust step interval based on calculated ratio
motor_moveInterval((unsigned long)(step_interval / r2));
}
/**
* Move motor specified number of steps without acceleration
* Converts input steps to microstepped steps using step_division
* @param steps_to_move Number of steps to move (positive = clockwise, negative = counter-clockwise)
*/
void motor_step(long steps_to_move) {
steps_to_move *= step_division; // Convert to microstepped steps
motor_setDirection(steps_to_move); // Set rotation direction
last_step_time = micros(); // Initialize step timestamp
// Generate each step pulse
for (long i = abs(steps_to_move); i > 0; i--) {
motor_move();
}
}
/**
* Move motor with acceleration, constant speed, and deceleration phases
* @param steps_to_move Total steps to move (signed for direction)
* @param steps_acc Number of steps used for acceleration phase
* @param steps_dec Number of steps used for deceleration phase
*/
void motor_step_accdec(long steps_to_move, long steps_acc, long steps_dec) {
// Convert all step counts to microstepped values
steps_to_move *= step_division;
steps_acc *= step_division;
steps_dec *= step_division;
motor_setDirection(steps_to_move); // Set rotation direction
last_step_time = micros(); // Initialize step timestamp
// Acceleration phase: gradually increase speed
if (steps_acc > 0) {
for (long i = 1; i <= steps_acc; i++) {
motor_dynamicMove(i, steps_acc);
}
}
// Constant speed phase: maintain steady speed
long constant_steps = abs(steps_to_move) - abs(steps_acc) - abs(steps_dec);
for (long i = constant_steps; i > 0; i--) {
motor_move();
}
// Deceleration phase: gradually decrease speed
if (steps_dec > 0) {
for (long i = (steps_dec - 1); i >= 0; i--) {
motor_dynamicMove(i, steps_dec);
}
}
}4. 编译上传
1. 下载模式:不同设备进行程序烧录前需要下载模式,不同的主控设备该步骤可能有所不同。详情可参考Arduino IDE上手教程页面底部的设备程序下载教程列表,查看具体的操作方式。
AtomS3R 长按复位按键 (大约 2 秒) 直到内部绿色 LED 灯亮起,便可松开,此时设备已进入下载模式,等待烧录。
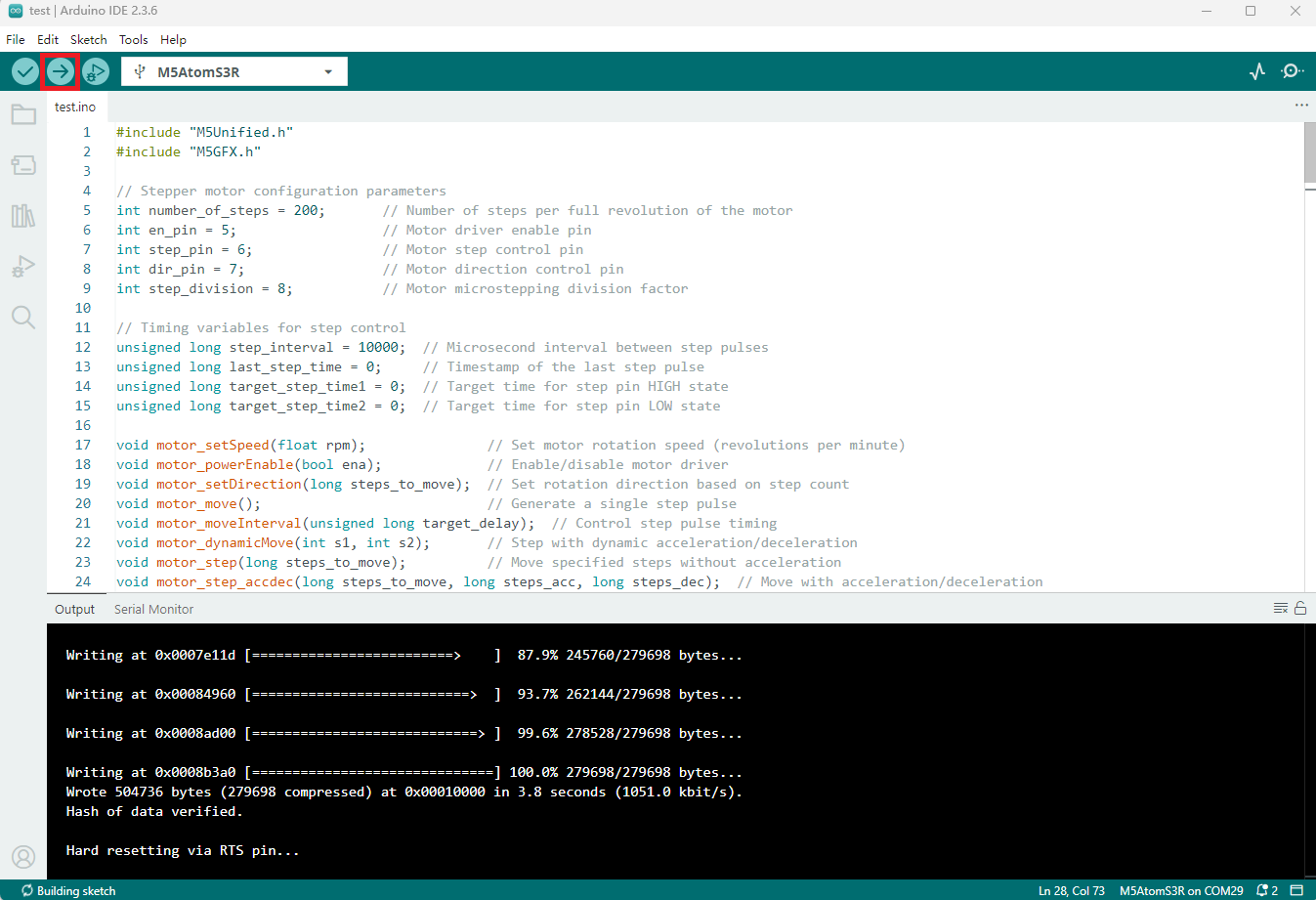
- 2. 选中设备端口,点击 Arduino IDE 左上角编译上传按钮,等待程序完成编译并上传至设备。
5. 步进电机控制
- 设备上电后按压一次屏幕,步进电机先正转 6 圈/ 1200 步,再反转 6 圈 / 1200 步,具体效果如下所示。
Page Tools