

Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
Chain 系列设备 Bus 通信使用教程
1. Chain Bus 总线说明
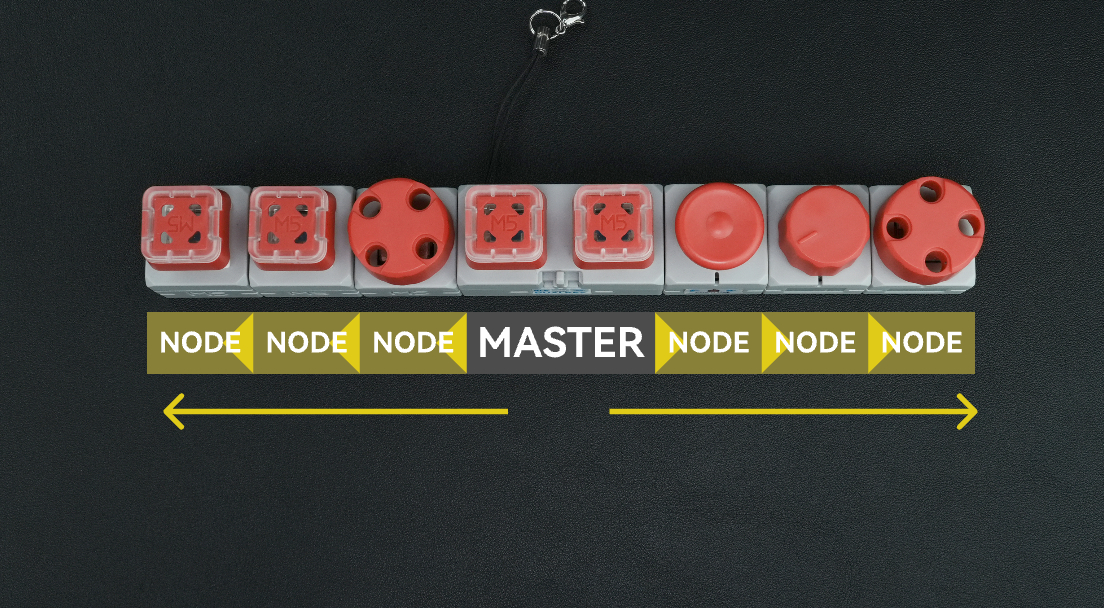
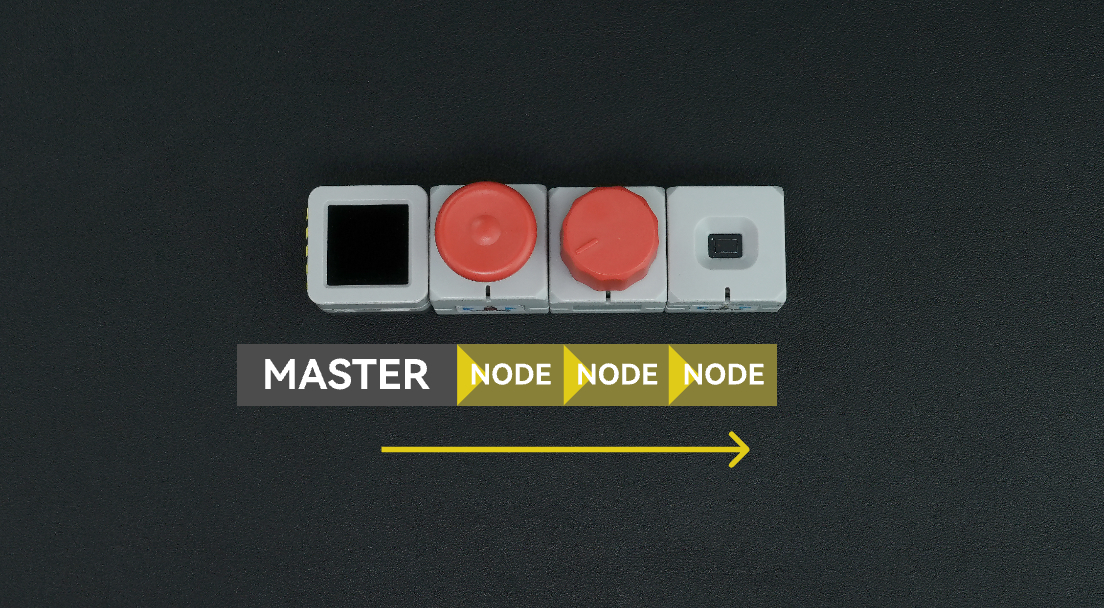
M5Stack Chain Bus 是一种采用 UART 通信接口的链式级联拓扑结构,由一个主控(Master)和多个节点(Node)构成。主控作为链路起点,其余节点按顺序依次串联在同一条总线上。系统工作时,各节点通过逐级转发数据包的方式与主控进行通信。
主控(Master)
主控设备通过 UART 接口 与 Chain Bus 进行通信。 主控可以拓展多条 Chain Bus 总线,数量取决于其可用的 UART 接口数量,从而实现多总线、多节点的灵活扩展。
节点(Node)
Chain 节点通常集成 STM32G031G8U6 作为核心控制器,使用 Chain 系列专用的 UART 串口级联通信协议 进行数据交互。 节点板载 2 个 HY2.0-4P 扩展接口,分别用于: 数据输入(IN) 与 数据输出(OUT)。连接时需要注意连接方向,主控连接至节点的数据输入(IN),然后由节点的数据输出(OUT)继续向后连接下一级的输入。
- Chain 系列主控:
- Chain 系列连接器:
- Chain 系列输入设备:
推荐使用 Chain DualKey 或是 Atom 系列主控搭配 Atomic ToChain Base 作为 Chain Bus 主控。
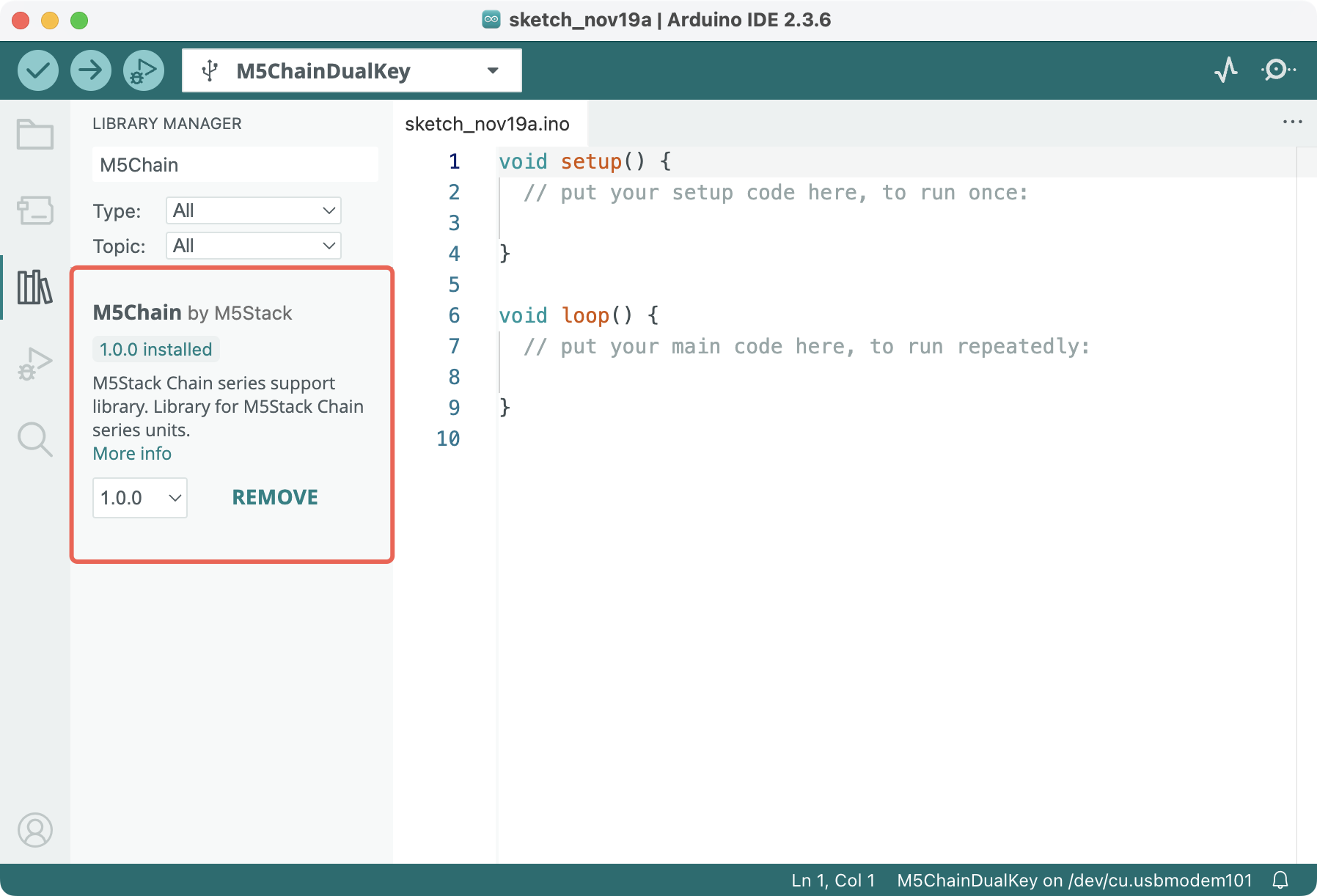
2. 驱动库
M5Chain Arduino 驱动库对 Chain Bus 协议进行了封装,能够方便主控对总线中的设备状态进行读取,控制和枚举扫描。
- 环境配置:参考 Arduino IDE 上手教程 完成 IDE 安装,并根据实际使用的开发板安装对应的板管理与需要的驱动库。
- 使用到的驱动库:
示例程序
以主控 Chain DualKey 举例,拓展连接 Chain 系列输入设备。
M5Chain 库版本 >= 1.0.0
#include "M5Chain.h"
#define RXD_PIN GPIO_NUM_5 // 47 for the other side of Chain DualKey
#define TXD_PIN GPIO_NUM_6 // 48 for the other side of Chain DualKey
Chain M5Chain;
chain_status_t chain_status;
device_list_t *device_list = NULL;
uint16_t device_count = 0;
uint8_t opr_status = 0;
uint8_t rgb_test[] = { 255, 255, 255 };
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("======================");
Serial.println("M5Stack Chain Bus Test");
M5Chain.begin(&Serial2, 115200, RXD_PIN, TXD_PIN);
}
void loop() {
Serial.println();
delay(2000);
if (!M5Chain.isDeviceConnected()) {
Serial.println("No device connected");
return;
}
chain_status = M5Chain.getDeviceNum(&device_count);
if (chain_status == CHAIN_OK) {
device_list = (device_list_t *)malloc(sizeof(device_list_t));
device_list->count = device_count;
device_list->devices = (device_info_t *)malloc(sizeof(device_info_t) * device_count);
} else {
Serial.printf("Get device count failed, chain status: %d\r\n", chain_status);
return;
}
if (!M5Chain.getDeviceList(device_list)) {
Serial.println("Get device list failed");
return;
}
if (device_list == NULL) {
Serial.println("Device list is NULL");
return;
}
Serial.printf("Device count: %d\r\n", device_list->count);
for (int i = 0; i < device_list->count; i++) {
Serial.print("- Device ID: ");
Serial.print(device_list->devices[i].id);
Serial.print(", type: ");
switch (device_list->devices[i].device_type) {
case CHAIN_UNKNOWN_TYPE_CODE:
Serial.println("Unknown");
break;
case CHAIN_ENCODER_TYPE_CODE:
Serial.println("Chain Encoder");
break;
case CHAIN_ANGLE_TYPE_CODE:
Serial.println("Chain Angle");
break;
case CHAIN_KEY_TYPE_CODE:
Serial.println("Chain Key");
break;
case CHAIN_JOYSTICK_TYPE_CODE:
Serial.println("Chain Joystick");
break;
case CHAIN_TOF_TYPE_CODE:
Serial.println("Chain ToF");
break;
// case CHAIN_UART_TYPE_CODE:
// Serial.println("Chain UART");
// break;
// case CHAIN_SWITCH_TYPE_CODE:
// Serial.println("Chain Switch");
// break;
// case CHAIN_PEDAL_TYPE_CODE:
// Serial.println("Chain Pedal");
// break;
// case CHAIN_PIR_TYPE_CODE:
// Serial.println("Chain PIR");
// break;
// case CHAIN_MIC_TYPE_CODE:
// Serial.println("Chain Mic");
// break;
// case CHAIN_BUZZER_TYPE_CODE:
// Serial.println("Chain Buzzer");
// break;
}
// Device ID, LED brightness (0-100), operation status pointer
chain_status = M5Chain.setRGBLight(device_list->devices[i].id, 100, &opr_status);
if (chain_status == CHAIN_OK && opr_status) {
Serial.println(" Set RGB brightness succeeded");
} else {
Serial.printf(" Set RGB brightness failed, chain status: %d, operation status: %d\r\n", chain_status, opr_status);
}
rgb_test[0] = random(0, 256); // [0, 255]
rgb_test[1] = random(0, 256); // [0, 255]
rgb_test[2] = random(0, 256); // [0, 255]
// Device ID, LED start index, LED count, RGB color, size of RGB color, operation status pointer
chain_status = M5Chain.setRGBValue(device_list->devices[i].id, 0, 1, rgb_test, 3, &opr_status);
if (chain_status == CHAIN_OK && opr_status) {
Serial.println(" Set RGB color succeeded");
} else {
Serial.printf(" Set RGB color failed, chain status: %d, operation status: %d\r\n", chain_status, opr_status);
}
}
}用 Chain Bridge 连接器连接主控 Chain DualKey 和各个 Chain 系列输入设备。连接时需要注意方向,三角箭头从主控 Chain DualKey 指向外侧,如图:
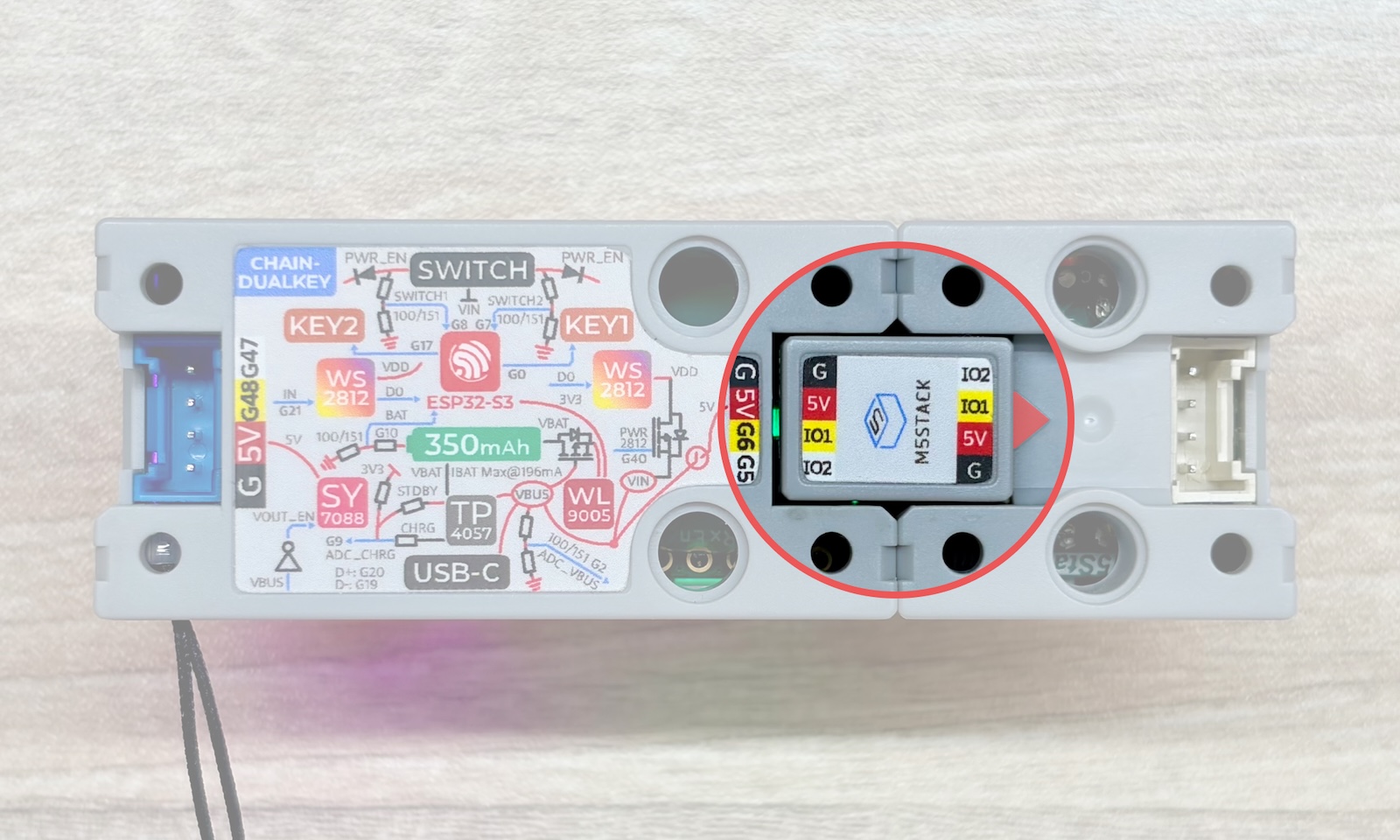
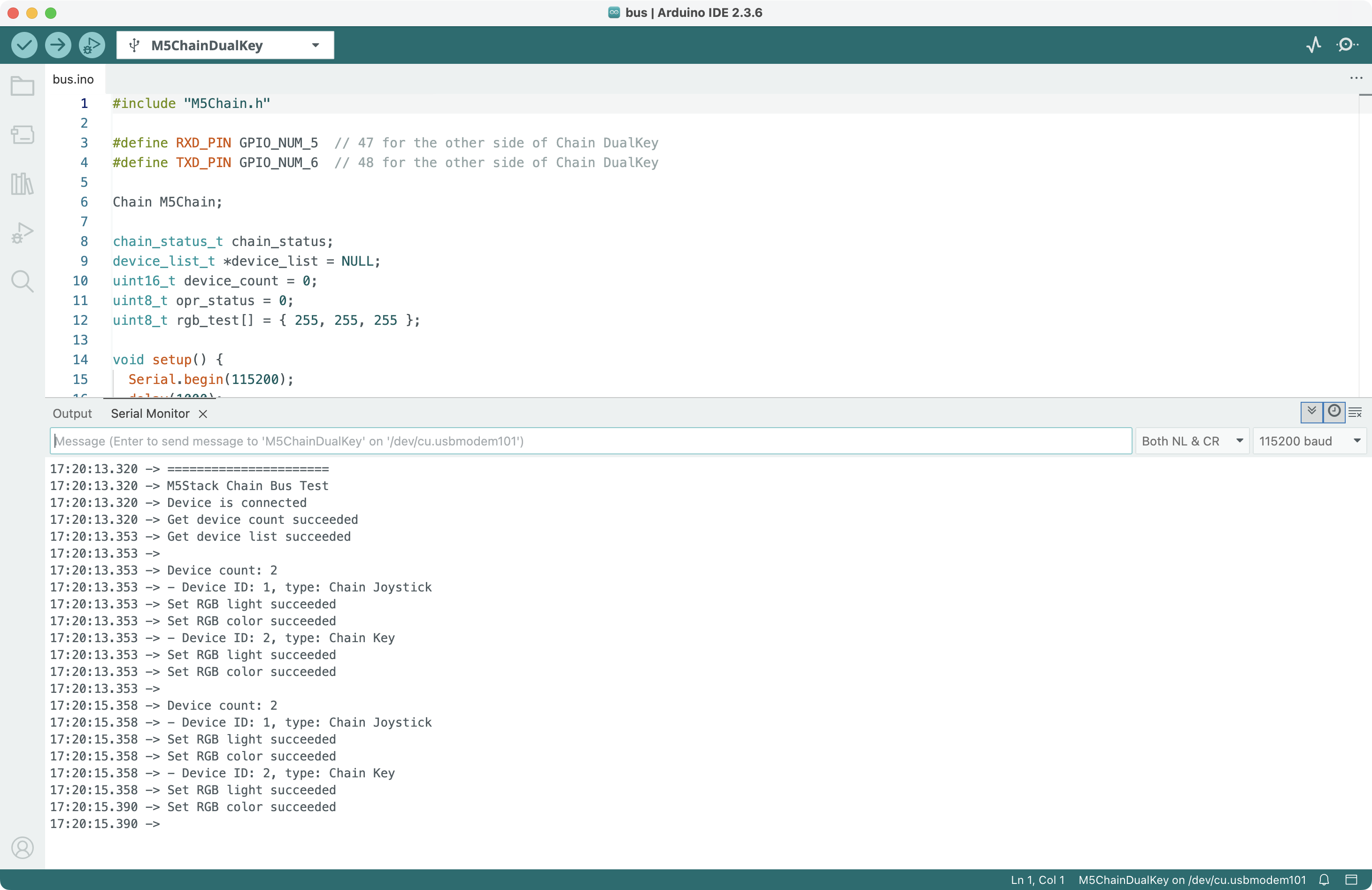
将以上程序编译并上传至设备,程序会每 2 秒检测一次 Chain DualKey 的 G5、G6 引脚一侧 Chain Bus 上的设备连接情况,打印到串口,并随机改变 RGB 灯的颜色。你可以在程序运行时热插拔多种、多个 Chain 系列设备。
若需要同时使用 Chain DualKey 两边的接口,需要在程序中创建两个 Chain 类型的实例,分别管理各自对应接口上的设备。
#include "M5Chain.h"
//Left side of Chain DualKey
#define RXD_PIN_L GPIO_NUM_5
#define TXD_PIN_L GPIO_NUM_6
//Right side of Chain DualKey
#define RXD_PIN_R GPIO_NUM_47
#define TXD_PIN_R GPIO_NUM_48
Chain M5ChainLeft;
Chain M5ChainRight;
void setup() {
M5ChainLeft.begin(&Serial1, 115200, RXD_PIN_L, TXD_PIN_L);
M5ChainRight.begin(&Serial2, 115200, RXD_PIN_R, TXD_PIN_R);
}
void loop(){
}
3.API
操作结果状态码
typedef enum {
CHAIN_OK = 0x00, // Operation successful
CHAIN_PARAMETER_ERROR = 0x01, // Parameter error
CHAIN_RETURN_PACKET_ERROR = 0x02, // Return packet error
CHAIN_BUSY = 0x04, // Device is busy
CHAIN_TIMEOUT = 0x05 // Operation timeout
} chain_status_t;begin
函数原型:
void begin(HardwareSerial *serial, unsigned long baud = 115200, int8_t rxPin = -1, int8_t txPin = -1);功能说明:
- 初始化 Chain Bus 通信总线
传入参数:
- HardwareSerial *serial
- 用于串行通信的硬件串口对象的指针
- unsigned long baud
- 串行通信的波特率,默认 115200
- int8_t rxPin
- 信号接收引脚的 GPIO 编号
- int8_t txPin
- 信号发送引脚的 GPIO 编号
返回值:
- null
isDeviceConnected
函数原型:
bool isDeviceConnected();功能说明:
- 检查 Chain Bus 上是否有设备连接
传入参数:
- null
返回值:
- bool
- true:有设备连接
- false:无设备连接
getDeviceNum
函数原型:
chain_status_t getDeviceNum(uint16_t *deviceNum);功能说明:
- 获取 Chain Bus 上连接的设备数量
传入参数:
- uint16_t *deviceNum
- 指针,用于存储设备数量的值
返回值:
- chain_status_t
- 操作结果状态码
getDeviceList
函数原型:
bool getDeviceList(device_list_t *list);功能说明:
- 获取 Chain Bus 上连接的设备列表
传入参数:
- device_list_t *list
- 指针,用于存储设备列表。其结构体中包含设备数量、各设备具体信息数组
typedef struct {
uint16_t count; // Number of devices
device_info_t *devices; // Array of devices
} device_list_t;返回值:
- bool
- true:获取成功
- false:获取失败
设备具体信息
通过 getDeviceList 函数获取的设备列表,类型为 device_list_t,其结构体中包含设备数量、各设备具体信息数组。而设备具体信息的类型为 device_info_t,其结构体中包含设备 ID、设备类型。
typedef struct {
uint16_t id; // Device ID
chain_device_type_t device_type; // Device type
} device_info_t;- 设备 ID
在一条 Chain Bus 上连接的各个设备都有唯一的设备 ID,用于单独识别和控制。每个设备的 ID 值由系统自动分配,按从主控向外的连接顺序从 1 开始递增:
Main Controller -> 1 -> 2 -> 3 -> ...
- 设备类型
设备类型枚举值如下:
typedef enum {
CHAIN_UNKNOWN_TYPE_CODE = 0x0000, // Unknown device type
CHAIN_ENCODER_TYPE_CODE = 0x0001, // Chain Encoder
CHAIN_ANGLE_TYPE_CODE = 0x0002, // Chain Angle
CHAIN_KEY_TYPE_CODE = 0x0003, // Chain Key
CHAIN_JOYSTICK_TYPE_CODE = 0x0004, // Chain Joystick
CHAIN_TOF_TYPE_CODE = 0x0005, // Chain ToF
CHAIN_UART_TYPE_CODE = 0x0006, // Chain UART
CHAIN_SWITCH_TYPE_CODE = 0x0007, // Chain Switch
CHAIN_PEDAL_TYPE_CODE = 0x0008, // Chain Pedal
CHAIN_PIR_TYPE_CODE = 0x0009, // Chain PIR
CHAIN_MIC_TYPE_CODE = 0x000A, // Chain Microphone
CHAIN_BUZZER_TYPE_CODE = 0x000B, // Chain Buzzer
} chain_device_type_t;setRGBLight
函数原型:
chain_status_t setRGBLight(uint16_t id, uint8_t rgbBrightness, uint8_t *operationStatus);功能说明:
- 设定设备上 RGB LED 灯的亮度
传入参数:
- uint16_t id
- 设备 ID
- uint8_t rgbBrightness
- 亮度值(0 - 100)
- uint8_t *operationStatus
- 指针,用于存储操作结果(0 为操作失败,1 为操作成功)
返回值:
- chain_status_t
- 操作结果状态码
setRGBValue
函数原型:
chain_status_t setRGBValue(uint16_t id, uint8_t index, uint8_t num, uint8_t *rgb, uint8_t size, uint8_t *operationStatus);功能说明:
- 设定设备上 RGB LED 灯的颜色
传入参数:
- uint16_t id
- 设备 ID
- uint8_t index
- 要控制的 LED 灯编号,从 0 开始
- uint8_t num
- 要控制的 LED 灯数量
- uint8_t *rgb
- 指针,指向 RGB 颜色数组,格式为 [R0, G0, B0, R1, G1, B1, ...]
- uint8_t size
- RGB 颜色数组的长度,需要等于灯数量的 3 倍
- uint8_t *operationStatus
- 指针,用于存储操作结果(0 为操作失败,1 为操作成功)
返回值:
- chain_status_t
- 操作结果状态码
4. 通信机制
Chain Bus 支持多设备热插拔、链式通信功能,得益于背后的 Chain Bus 通信机制,包含设备发现、ID 分配、命令传递等部分。
设备 ID
在一条 Chain Bus 上连接的各个设备具有唯一的设备 ID,用于单独识别和控制。每个设备的 ID 值由系统自动分配,从主控向外,按照连接顺序从 1 开始递增。
设备类型
设备类型 chain_device_type_t 用于区分不同类型的设备,如 CHAIN_ENCODER_TYPE_CODE、CHAIN_KEY_TYPE_CODE 等。
数据传输与响应
主控向 Chain Bus 发送的数据包从主控串口发出,进入设备链路。与主控相连的第一个设备会检查数据包中的目标设备 ID。如果 ID == 1,说明该设备就是目标设备,直接处理此数据包;如果 ID > 1,该设备会执行 ID = ID - 1,然后将数据包转发给链路中的下一个设备。以此类推,直到数据包被传递到对应的目标设备,触发 ID == 1,由该设备完成数据处理。
数据包处理完成后,设备会向链路反方向发送响应数据包。每个设备在转发响应数据包之前会执行 ID = ID + 1,最终将响应数据包发回主控,主控便可得知响应数据包来自哪个设备。
尾部设备
每个 Chain 系列设备在上电初始化时,默认将自身视为链路的 尾部设备。设备首次接收到来自链路中下一个设备的完整数据包后,会将自身状态更新为 非尾部设备。
心跳包
心跳包是 Chain Bus 链路中一种特殊的数据包,用于设备之间的定期通信。链路中的设备每秒钟主动向下一个设备发送心跳包,下一个设备收到心跳包会立即将其原样返回作为应答。
如果一个设备连续三次发送心跳包均未收到下一个设备的应答,则认为下一个设备已离线,该设备会将自身状态更新为 尾部设备。
主控也会向链路发送心跳包。如果收到有效应答,表明链路中有设备连接;如果未收到应答,则表明链路中无设备连接。
枚举包
枚举包是 Chain Bus 链路中一种特殊的数据包,用于更新链路连接结构。一个新设备进入链路时,会自动发送 3 次枚举请求(每次时间间隔为 180 ms),以通知主控链路发生了变化。主控收到这样的枚举数据包,会重新发起设备枚举,以更新链路连接结构和设备列表。
反之当链路中某处断开,断开处上一个设备发送的心跳包收不到应答,会将自身状态从 非尾部设备 更新为 尾部设备,并主动发送 3 次枚举请求,以通知主控链路发生了变化。
对于主控发起的设备枚举指令,链路的尾部设备负责终止枚举流程,将结果数据包传回主控,完成整个链路的枚举操作。